・上一文章:汽车电线束导线寿命研究
・下一文章:手机遥控车辆系统的设计
摘要:本文从车身控制系统的类型选择、车身控制单元的硬件电路设计、软件的功能实现策略等方面研究,实现了车身控制系统低功耗设计,并经实车验证测试可完全满足设计要求。
随着汽车电子技术的发展,越来越多的电控单元被应用到车上,在提高车辆舒适性的同时对整车电池电量也提出了严峻的挑战。如今汽车系统中很多应用需要蓄电池直接供电,即使是在汽车熄火后也是如此。这就要求整车架构合理分配各个电气系统功能,对各个系统功耗提出要求。车身控制系统做为整车电气系统的一部分,如何做到系统低功耗,节约能量,成为车身控制系统设计一项重要指标。
1 车身控制系统原理
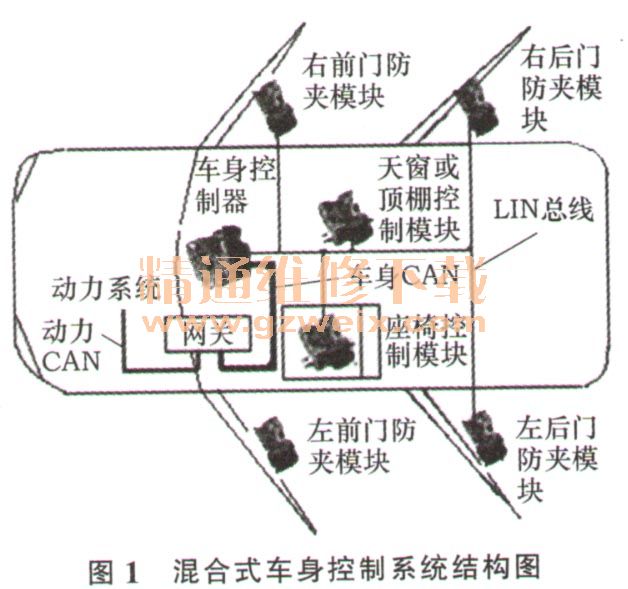
车身控制系统类型可分为分散式车身控制系统、集中式车身控制系统、分布式车身控制系统以及以集中式为基础的混合式车身控制系统4种方式,其中国内大部分车型采用以集中式为基础的混合式车身控制系统。这种车身控制系统的基本特征有2个:①具备集中式系统的车身控制器;②部分子系统的控制方式与分布式或者分散式控制系统相同。此系统典型的结构图如图1所示。
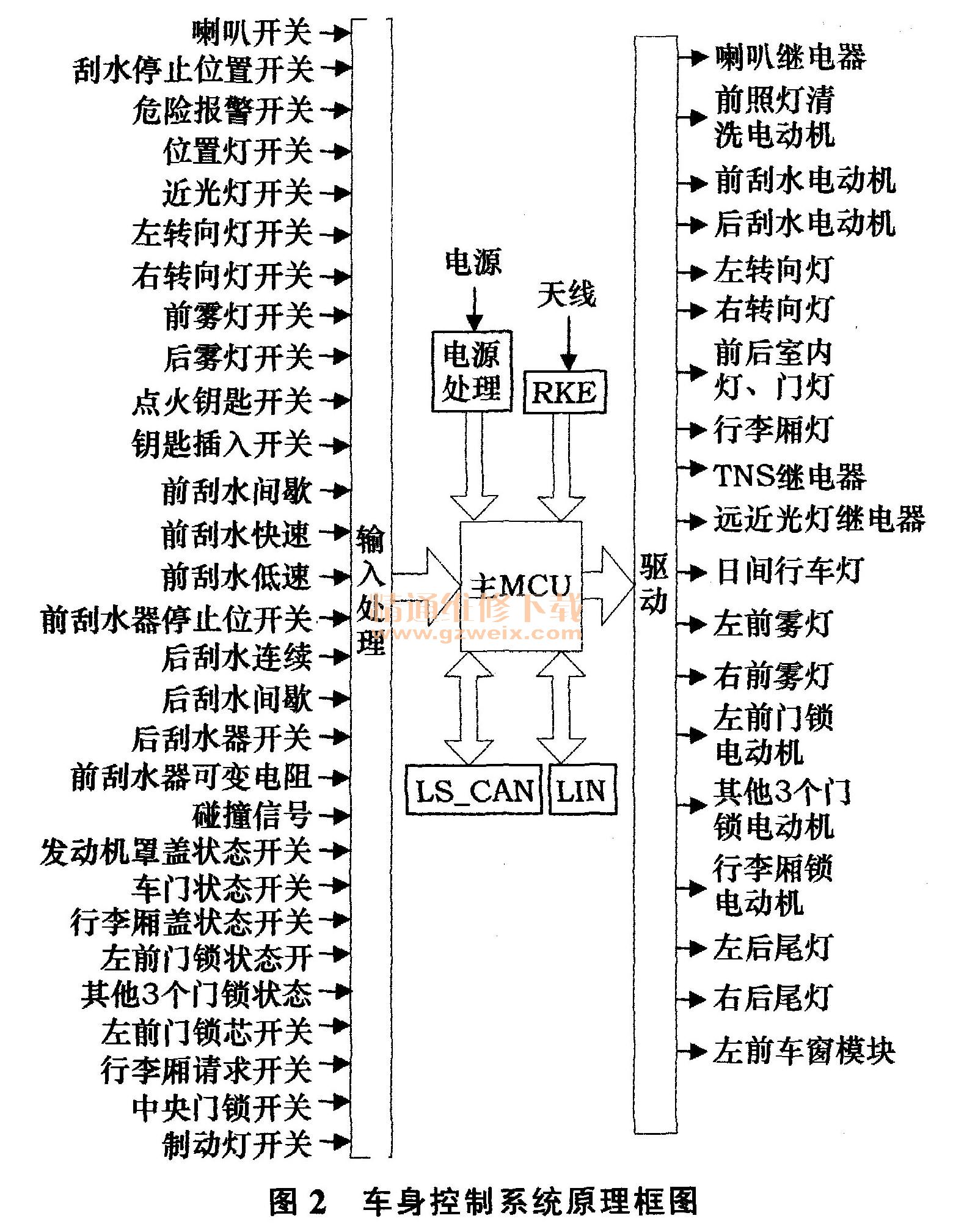
一汽轿车股份有限公司奔腾B90车型的车身控制系统采用的是以集中式为基础的混合式车身控制系统。其基本原理为:通过外部I/O及总线接口接收车内的一些开关信号、传感器信号以及CAN、LIN总线等数据信号,通过控制器MCU控制逻辑和驱动电路实现对外围负载的控制,原理框图如图2所示。
2 系统低功耗设计
低功耗是车载电器的一项重要指标,由于低功耗设计的前提是不影响车身控制单元(以下简称BCM)的正常工作,因此在通过合理硬件设计,还需结合软件策略才能有效控制其电流消耗。因此,BCM的低功耗要从硬件和软件两个方面共同考虑设计,实现车身控制的低功耗设计。
2.1硬件电路设计
硬件电路设计主要从电源管理、核心MCU、CAN总线和LIN总线通信相关的芯片以及对执行器驱动芯片的选择本身的耗电特性,选择可以满足系统功能要求和低功耗设计的芯片。
2.1.1核心单片机的选择
根据I/O统计、总线资源、运行模式等特点,轿车公司奔腾B90车型BCM采用Freescale公司的MC9S 12XE系列的MC9Sl2XET256MAA作为核心CPU。MC9S 12XE系列是一个专注于低功耗、高性能、低引脚数量的高效汽车级16位微控制器产品,满足通用汽车CAN或LIN通信应用。
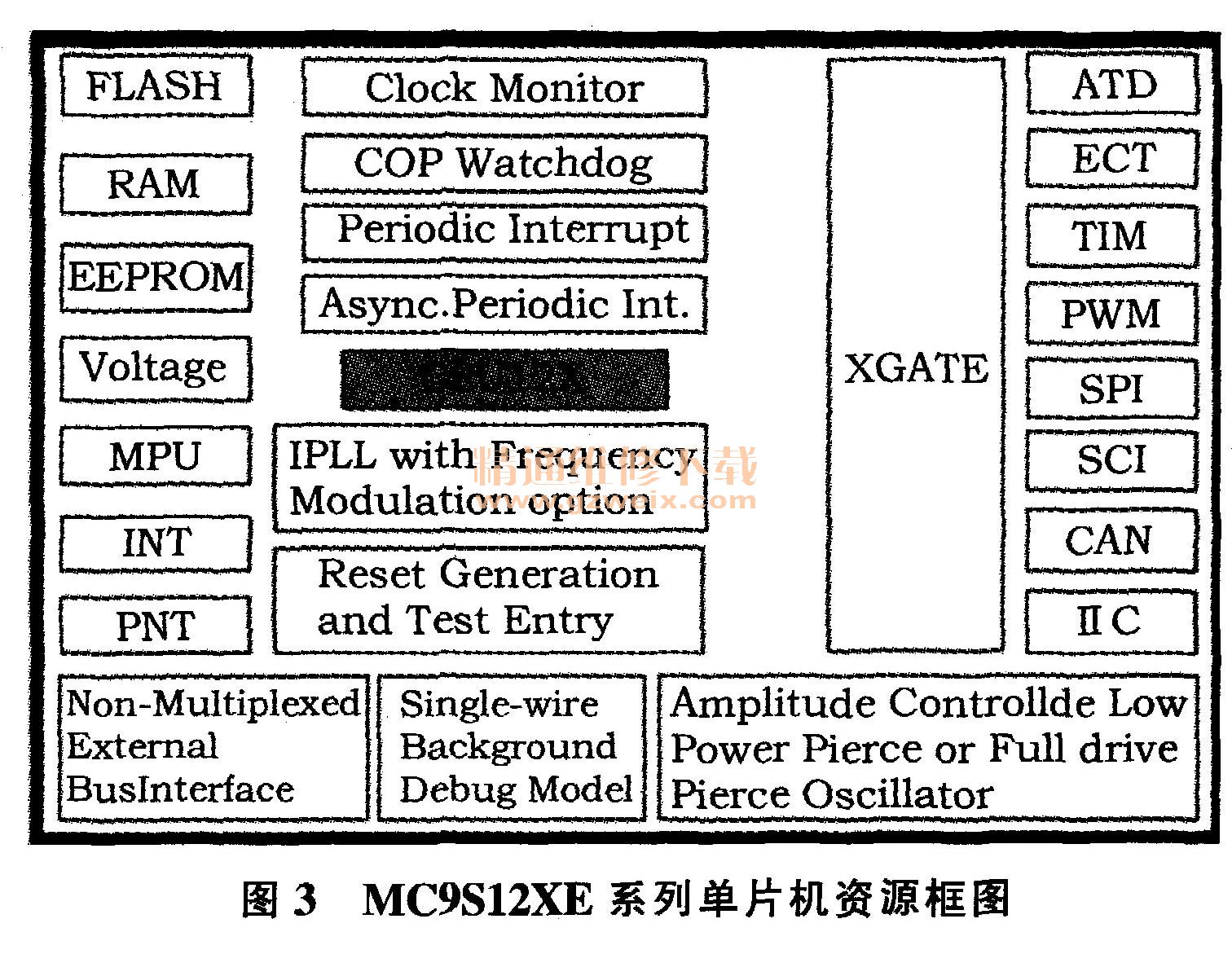
MC9S 12XET256MAA核心为S 12X CPU,具有灵活可编程硬件仿真的EEPROM、存储器保护单元、增强型中断模块、环路控制/全摆幅Pierce振荡器、增强型捕捉定时器、周期中断定时器、脉宽调制器、非多工外部总线接口;模数转换器12位分辨率,存储保护单元与超级用户/用户模式支持系统完整性,支持实时中断、异步周期中断,能够实现CAN、SPI和LIN总线通信功能;另外XGATE协处理器可建立虚拟外设提高整体性能。最重要的是MC9Sl2XET256MAA提供低功耗模式,每个模块不但提供I/O端口,而且还在1/O端口提供中断功能,允许从停止或等待模式中唤醒。 Freescale单片机MC9Sl2XE系列单片机资源如图3所示。
MC9S 12XET256MAA的3种低功耗模式分别如下。
1)等待模式在等待低功耗模式下,内部CPU时钟关闭但内部总线时钟不停止,允许定时器中断,且定时器继续在工作。在等待模式下,微控制器仍可执行与定时器相关的工作。该模式下只有中断源(IRQ、KBI)及SCI等中断或复位能唤醒微控制器,且保持I/O引脚的电平不变,系统内所有寄存器和RAM中的内容也不变。等待模式下,系统功耗一般降低有限,相当于工作模式的50%~70%。
2)深度停机模式微控制器在深度停机模式下处于最小的功耗模式。在深度停机模式下,微控制器全部关闭了内部CPU和内部总线的时钟,停止了微控制器内部的操作,CPU消耗电流可降到μA级。进入深度停机模式无异于关机,片内RAM停止供电后,RAM中存储的数据会丢失,也就是说,唤醒CPU后要重新对系统作初始化。深度停机模式关掉了所有的I/O,可能的唤醒方式也很有限,一般只能是复位或IRQ中断等。
3)一般停机模式一般停机模式微控制器的系统时钟会被禁止,但是振荡器、看门狗、支持实时中断(RTI )、异步周期中断( API)、模数转换器(ATD)功能会被使能,其他功能会被关闭,这种模式比深度停机模式消耗电流大,但是优点在于控制器中所有RAM数据和寄存器数据均不变,I/O引脚的电平也保持不变,外部振荡器继续运行,可以定时唤醒查询I/O状态,且唤醒时间很短。
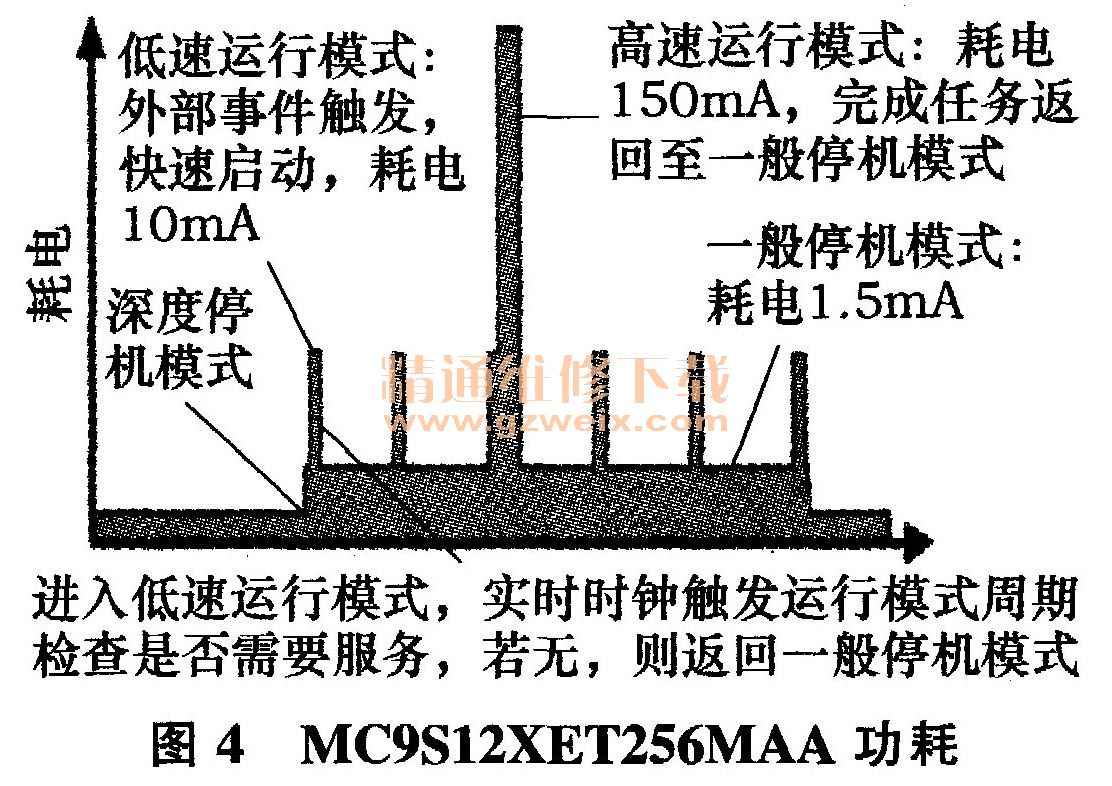
在室温(25℃)下,不包括I/O口的负载,以5V供电。由于系统需定时查询I/O状态,所以需要定时唤醒,运行在一般停机模式,最小功耗为1.5 mA。功耗如图4所示。
2.1.2电源管理
BCM的设计首先应该确定电源要求,选择合适的电源处理方案。综合考虑BCM电源要求:工作电压最小值9V,最大值16V;静态电流最大值5 mA。选用低功耗带复位功能芯片,而且要带有切断内部电源及睡眠唤醒功能,当IG1供电可以唤醒整个系统及时给单片机供电,单片机接收电源管理芯片提供的5V电压并工作,且具集成LIN总线收发器,直接和总线相连,并通过SPI通信与单片机进行数据交互,使单片机完成控制。当本地开关无变化和总线无信号情况下,设置为睡眠模式。
恩智浦半导体推出其第2代车载网络LIN核的系统基础芯片UJA1079A SBC,产品集成以下功能器件: LIN收发器,符合LIN 2.1和LIN2.0标准,并兼容LIN1.3规范;250 mA的电压调节器,用于微控制器及外部设备的可扩展稳压器(V1);串行外设接口(SPI )(全双工);器件带有唤醒源检测,可通过CAN、LIN总线或本地唤醒管脚来唤醒;2个唤醒管脚,可以断开WAKE 1和WAKE2输入来降低电流;待机模式具有极低的待机电流和完整的唤醒功能;睡眠模式具有极低的睡眠电流和完整的唤醒功能。
根据功能逻辑,当系统处于睡眠模式时,单片机选择性地给外围驱动电路提供电源,I/O端口上拉供电控制电路如图5所示。

单片机通过SPI与电源管理芯片交互信息,实现整个系统睡眠、唤醒控制,使功耗达到最低。
2.1.3 CAN总线通信硬件设计
在奔腾B90车型总线平台中,车身控制单元位于整车架构的舒适CAN总线中,通信速率为100 k/s ,由于CAN控制器集成在单片机中,那么CAN收发器的选择对降低功耗尤为重要。
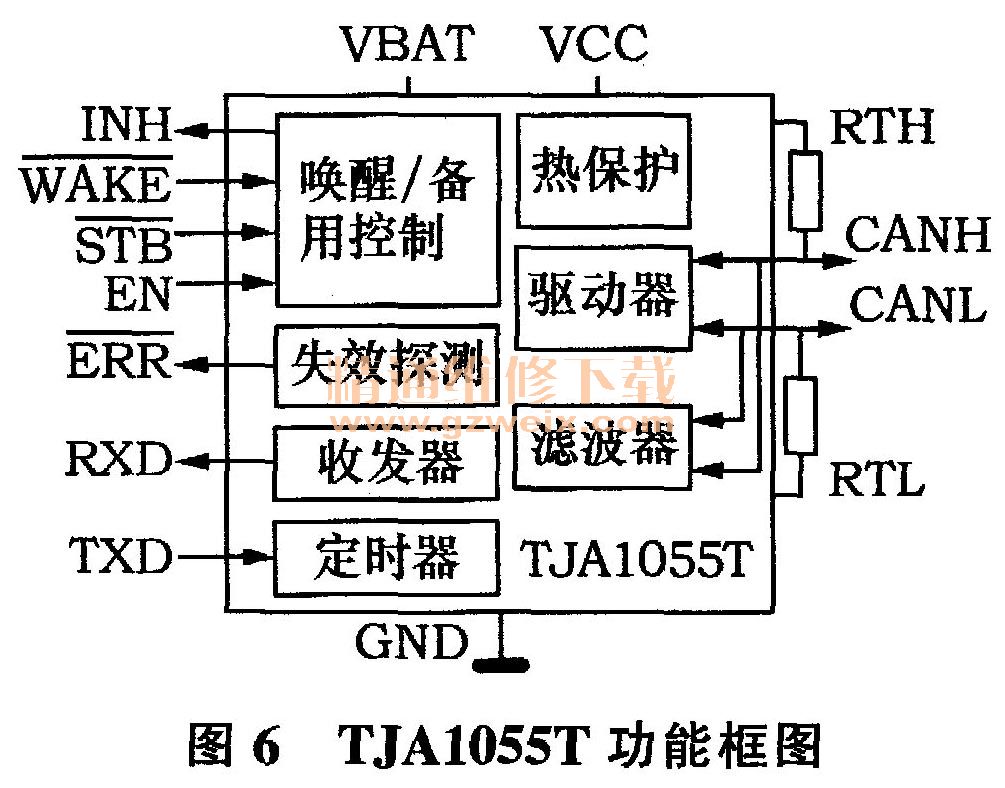
TJA 1055T是CAN协议控制器和物理总线之间的接口。它采用独特的绝缘层上覆硅工艺技术,在ESD、EMC以及功耗方面都有明显改善,其原理框图如图6所示。
TJA 1055T特性及优势如下。
1)特性增强的总线故障管理功能;波特率达125 kB/s ;完全集成接收滤波器;故障模式期间仍有唤醒能力;可以通过总线远端或本地唤醒;支持单线传输,地偏移电压可达1.5 V;睡眠和备用模式下电流消耗极低。
2)优势总线故障修复后自动复位;故障模式期间仍有唤醒能力;睡眠和备用模式下电流消耗极低。因此,奔腾B90 BCM CAN收发器选择TJA 1055T。
2.1.4驱动芯片的选择
由于铜价格不断上涨,继电器的价格不断升高,高、低边驱动芯片的价格却不断降低,因此在系统硬件设计中,采用高、低边驱动芯片驱动外围负载。比如位置灯、转向灯、倒车灯、制动灯、后雾灯等都可以使用HSDMOS来驱动。采用高低边驱动芯片代替继电器,不仅节省了布板空间,又比继电器多了短路保护和诊断、断路检测、过温保护等优点,最为重要的是降低了系统功耗。以下为部分功能驱动选择的高低边驱动芯片。
1)低边驱动VNB35NV04,用于以PWM形式驱动室内灯、门灯,单路。最大驱动电流:30A,内阻10 mΩ,静态功耗为100μA。
2)高边驱动VN5E025AJ-E,用于驱动DRL,单路。最大驱动电流为60 A,内阻25 mΩ,静态功耗为2μA。
")
")
")
")

