2)单击“DMU Kinematics(数字模型运动)”工具栏中的“Simulation with Laws(用规则模拟)”按钮

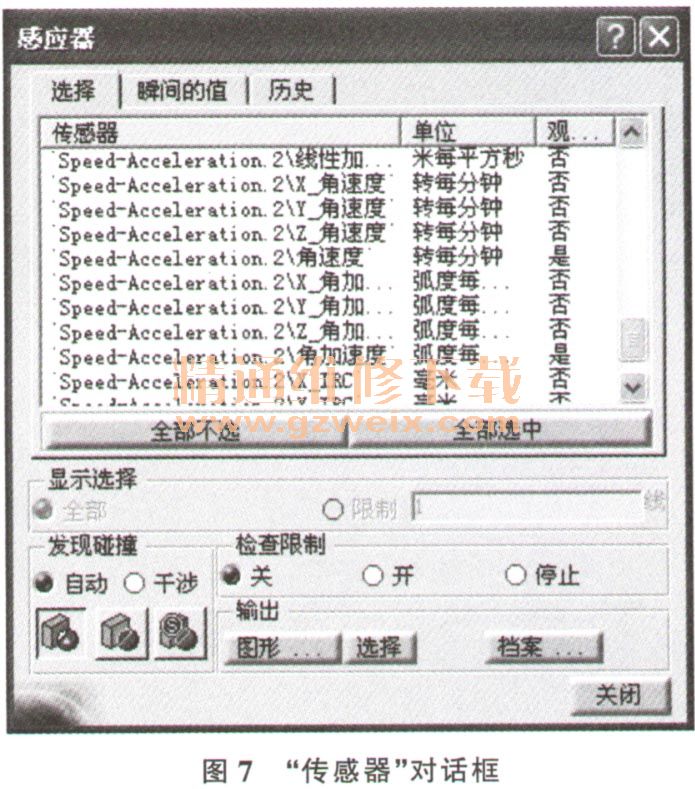
,弹出“Kinematics Simulatio。Mechanism.1(运动模拟)”对话框,如图6所示。单击对话框中的“Analysis(分析)”按钮,弹出 Simulation Duration(模拟时间)”对话框,将模拟时间修改为2sa单击“Activate sensor(激活传感器)”对话框,如图7所示。激活“Mechanism.)\连接点\旋转.4\角度”、“Mechanism. 1\连接点\旋转.7\角度”、“Mechanism.1\连接点\旋转.10\角度”、"Speed-Acceleration.)\角速度”、“Speed-Acceleration. 1\角加速度”、“Speed -Acceleration.2\角速度”、“Speed-Acceleration-2\角加速度”。

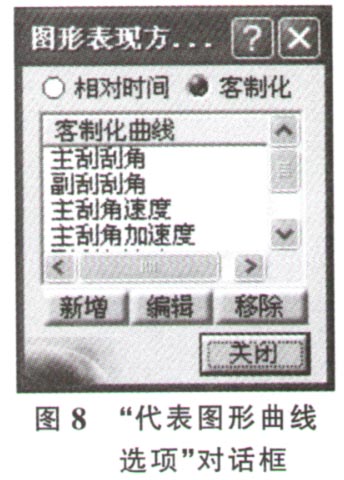
单击“选择”按钮,弹出“GraphicalReproduction Option(代表图形曲线选项)”对话框,见图8。编制客制化曲线:主刮刮角(“Mechanism. 1\连接点\旋转.4\角度”为横坐标,“Mechanism. 1\连接点\旋转.7\角度”为纵坐标)、副刮刮角("Mechanism.1\连接点、旋转.4\角度”为横坐标,"Mechanism.1\连接点\旋转.10\角度”为纵坐标)、主刮角速度(“Mechanism. 1\连接点、旋转.4\角度”为横坐标,“Speed -Acceleration. 1\角速度”为纵坐标)、主刮角加速度(“Mechanism. 1\连接点、旋转.4\角度”为横坐标,“Speed-Acceleration. 1\角加速度”为纵坐标)、副刮角速度(“Mechanism.)\连接点\旋转.4\角度”为横坐标,“Speed -Acceleration.2\角速度”为纵坐标)、副刮角加速度(“Mechanism. 1\连接点\旋转.4\角度”为横坐标,“Speed-Acceleration.2\角加速度”为纵坐标)。
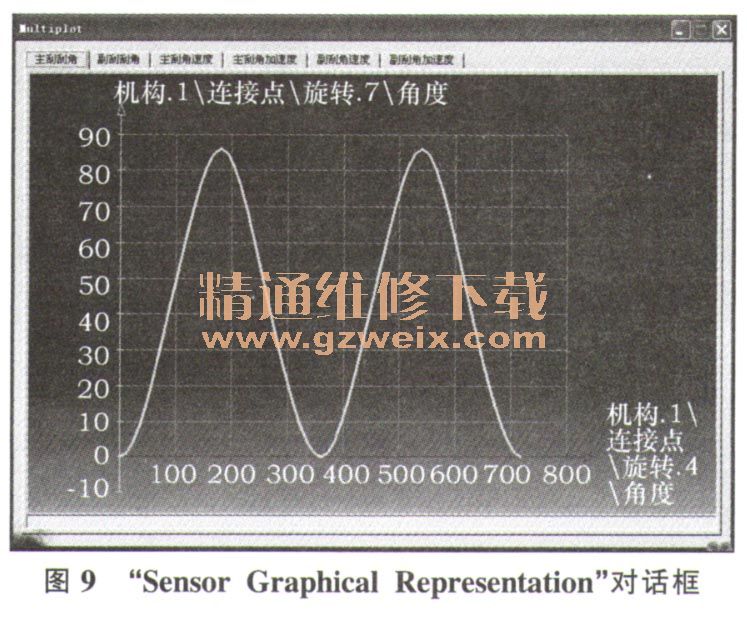
然后对模型进行模拟,可得所需要的参数,以图形形式显示,见图9。单击“File(文件)”按钮,可以将曲线参数保存在Excel表格中。
2.5数据分析
根据章节2.4得到的曲线参数见表2。
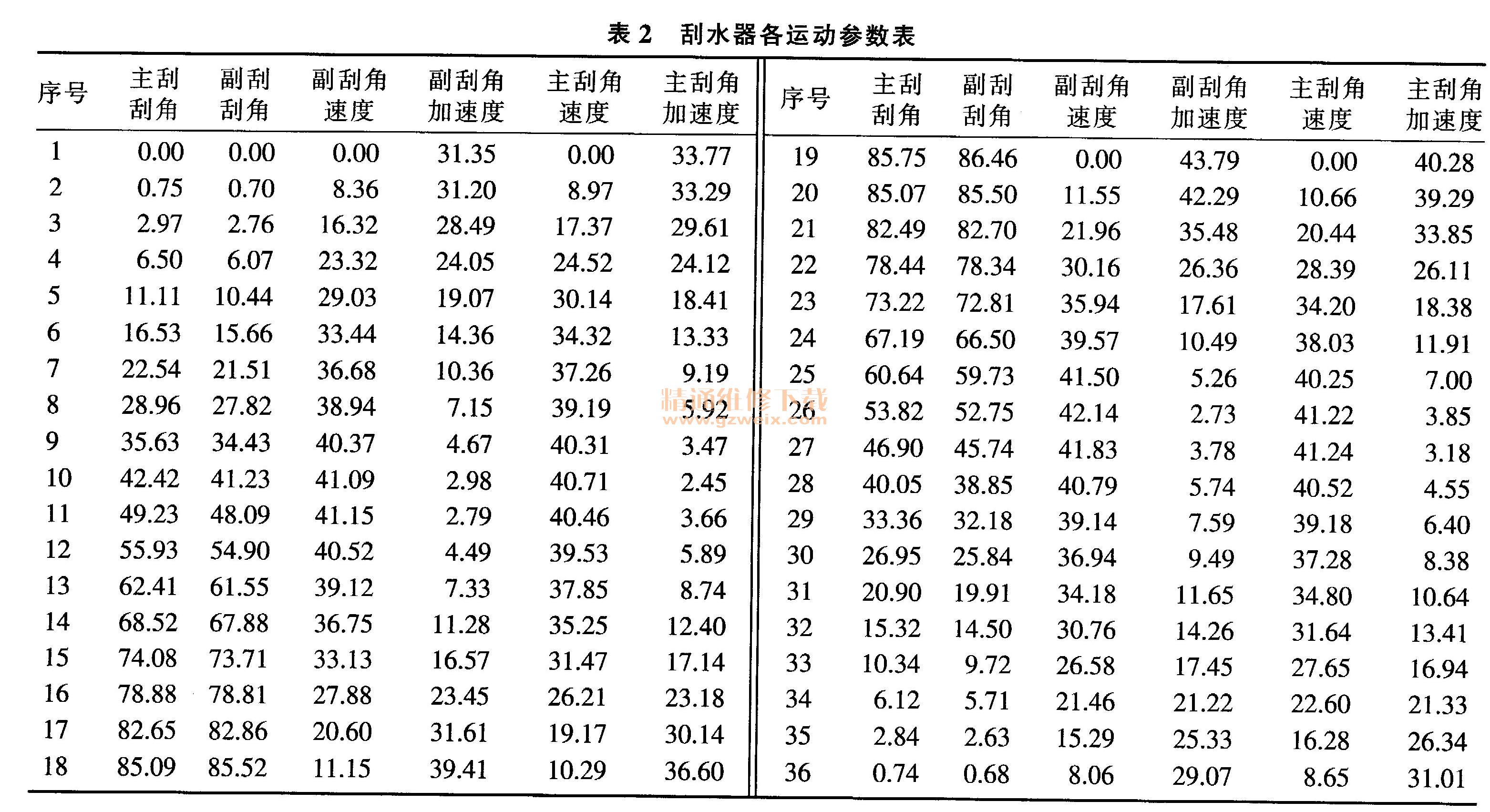
通过对表2的分析,可得出如下结论:①刮水器主刮刮角约为85.8°,满足设计刮角≤100°的要求;②刮水器副刮刮角约为86.5°,满足设计刮角≤100°的要求;③主刮最大角速度约为41.3 rad/s,最大角加速度约为40.5 rad/s2(此时刮速为0) ;④副刮最大角速度约为42.2 rad/s,最大角加速度约为44rad/s2(此时刮速为0) ;⑤主、副刮臂刮片同时到达其最大加速度位置。
上一页 [1] [2] [3] 下一页
")
")
")
")

