・上一文章:奥迪A6L轿车加速时耸车检修
・下一文章:2016年宝骏560转向柱锁匹配
三、ECVT构型分析
对于混合动力汽车ECVT构型,发动机的功率将通过两条路径传递到车轮。一条路径为机械路径,即发动机的部分功率通过行星齿轮机构直接传递到车轮。另一条路径为电路径(发动机一电动机/发电机MG1一电动机MG2)、MG1通过行星齿轮机构吸收发动机部分功率转为发电,为电机MG2提供驱动车辆能量或为动力蓄电池充电(电池SOC小于下限值时)。不同传动比下二者的功率分配比例不同。由于分配到电路径的功率存在二次转换时的功率损失,因此分配到电路径的功率越少,系统效率越高。当发动机的全部功率都经机械路径传递到车轮时,系统效率是最高的,这点称为机械点(任意一个电机的转速等于零),对于单模式功率分流型混合动力汽车,只存在一个机械点,即MG1转速等于零。而对于双模功率分流型混合动力汽车,存在两个机械点(两个行星齿轮排)或三个机械点(三个行星齿轮排),相对增大了系统高效率区间。
分析ECVT构型的转速和转矩采用杠杆分析法模型—杠杆图来分析。杠杆法原本用来分析AT变速器中的行星排机构,后来推广到分析功率分流式ECVT构型。通过将ECVT构型简图转换为杠杆图,从杠杆图上可以直观得看出各个构件的运动关系。使用杠杆法不仅分析起来简单,而且功能比较强大。静态时,杠杆法能分析此时构型的连接情况,所连接各部件的运动关系;动态时,能直观分析出构型单一模式的连续变化和模式切换情况。由于杠杆法的方便性,因此它成为了在ECVT构型设计与分析过程中的主要方法。
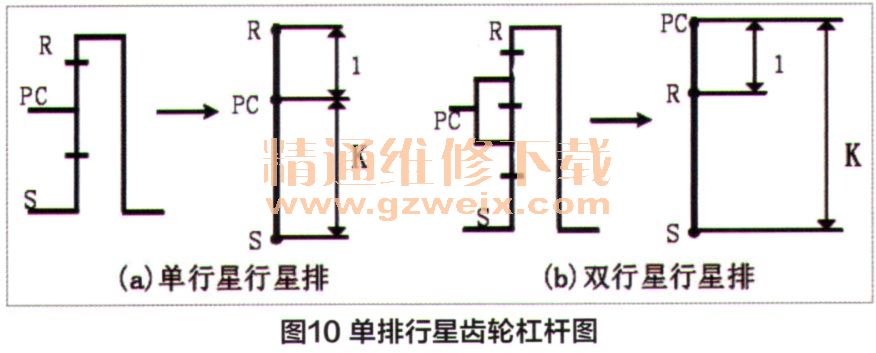
首先是行星齿轮机构等效杠杆图的分析。单排行星齿轮机构转换成杠杆的过程如图10所示,图10(a)是单行星轮行星排的转换过程,图10(b)是双行星轮行星排的转换过程。其中K为行星齿轮排特性参数,等于齿圈齿数与太阳轮齿数之比。
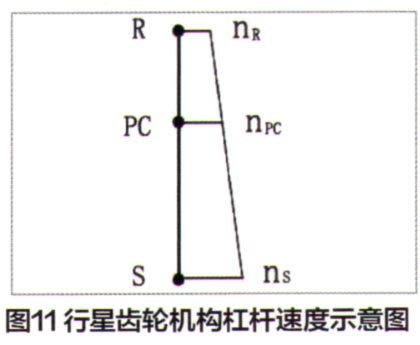
其次是转速的分析。把行星齿轮机构上三元件,太阳轮S、齿圈R、行星架PC啮合点看成3个支点,其各自的速度、大小和方向可以用如图11所示的线段表示出来。纵轴上线段表示行星齿轮排特性参数比,横轴线段长度表示转速的大小,可以定义线段在杠杆的右侧为正方向,三条线段的一端总会在一条直线上。因此只要知道其中两元件白勺转速,第三个的转速就可以通过杠杆图直观的看出。
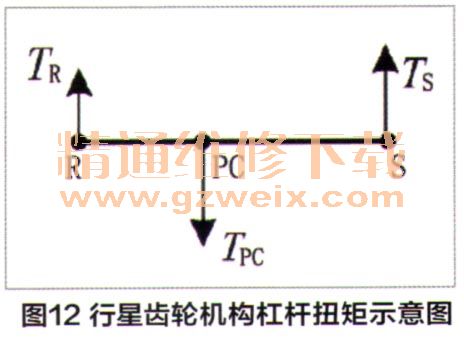
最后是转矩的分析。可以将行星排上三元件的转矩看成如图12中所示杠杆所受的3个力(大小和方向)。如果将某个点看成支点,另外两个点上有力平衡的关系,并且这3个力也平衡,相加为零。
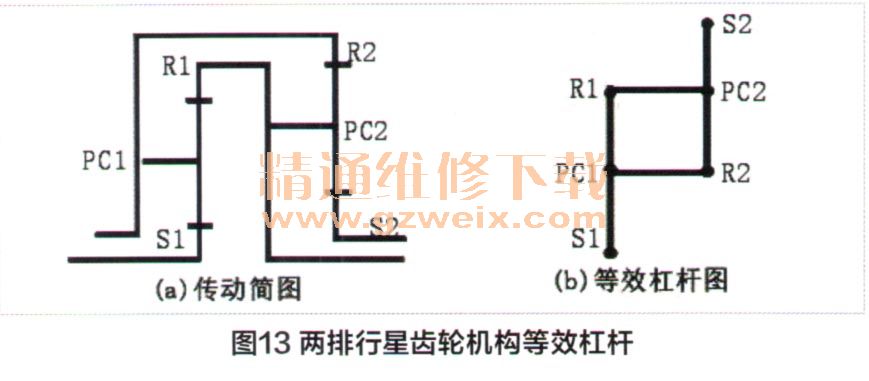
两个行星扫湘连的行星机构等效杠杆图的画法如图13所示。机构中相连的元了牛在杠杆图中用线段连起来。并对每个杠杆进行比例缩放,使公共部分的力臂长度相同。
")
")
")
")

