・上一文章:奥迪A6L轿车加速时耸车检修
・下一文章:2016年宝骏560转向柱锁匹配
1.功率输入分流模式分析
雷克萨斯LS600h采用THS-II系统属于功率输入分流模式构型(本文中已介绍过构型的组成)。通过制动器的不同组合状态,后排拉维娜行星齿轮机构可以提供1.9和3.9两种不同传动比,分别适用低速EVT1和高速EVT2两种工况。
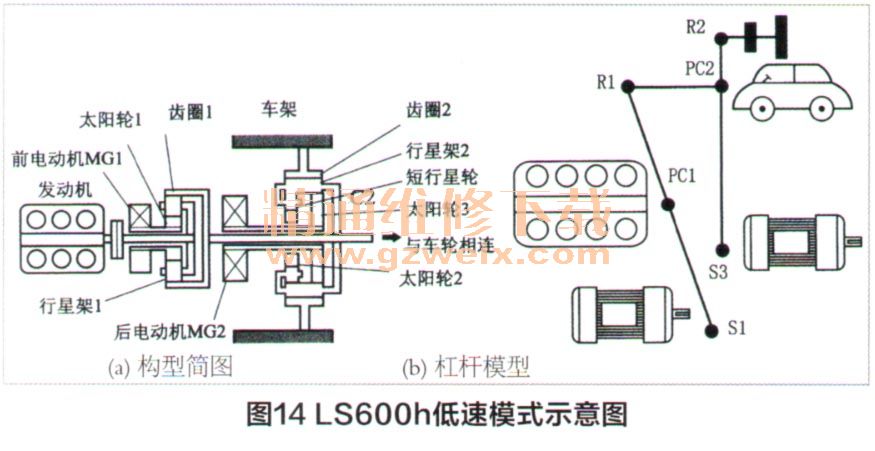
(1)低速工况(大负荷)
在低速工况下,后排拉维娜行星齿轮组的齿圈R2被制动其构型简图和杠杆模型如图14(a)和14(b)所示。
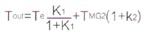
由此可以得到低速输出的扭矩关系式:
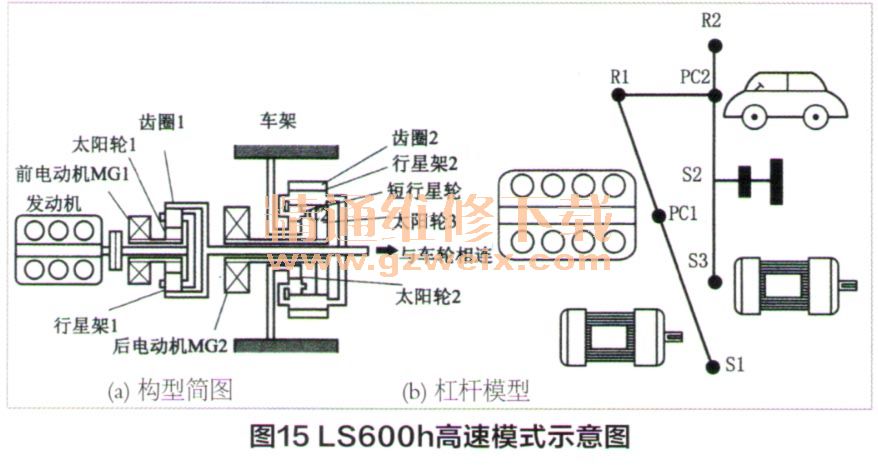
(2)高速工况(小负荷)
在高速工况下,后排拉维娜行星齿轮组的小太阳轮S3被制动,齿圈处于空转状态,其高速构型简图和杠杆模型如图15(a)和15(b)所示。
由此可以得到高速输出的转速和扭矩关系式:
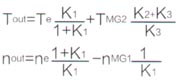
式中:
Tout-输出扭矩;
Te-发动机扭矢巨;
TMG2-MG2扭矩;
Nout-输出转速;
Ne-发动机转速;
nMG1-MG 1转速;
K1、K2、K3-行星齿轮特性参数;
K1=2.29;
K2=2.9;
K3=3.2。
由于雷克萨斯LS600h的ECVT构型属于单模型式(功率输入型),转速输出由前排动力分配行星齿轮组中连接发动机的转速和发电机/电动机MG1的转速稿合所决定,后排拉维娜行星齿轮组只负责驱动电机MG2的减速增扭作用,所有高、低速模式的转速关系式应是相同。
根据两排行星齿轮组特性参数K1=2.29,K2=2.9,K3=3.2、通过计算画出杠杆图,如图16、17所示。
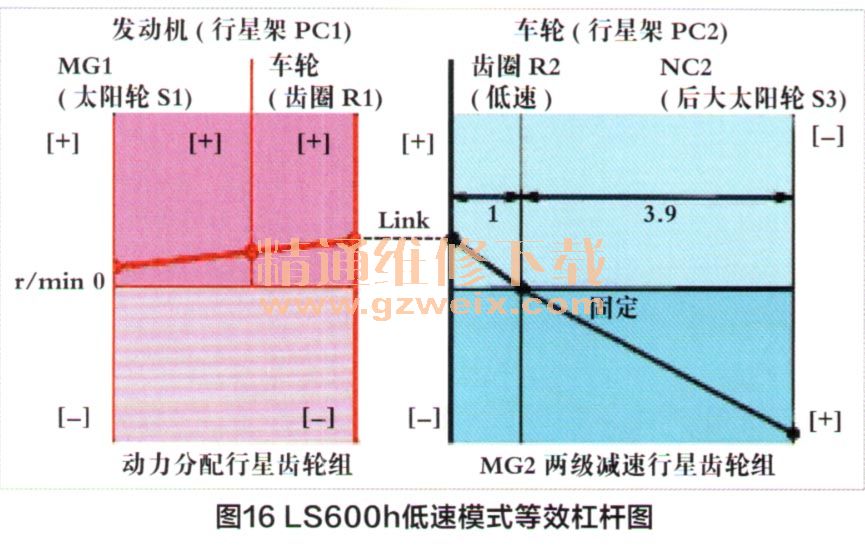
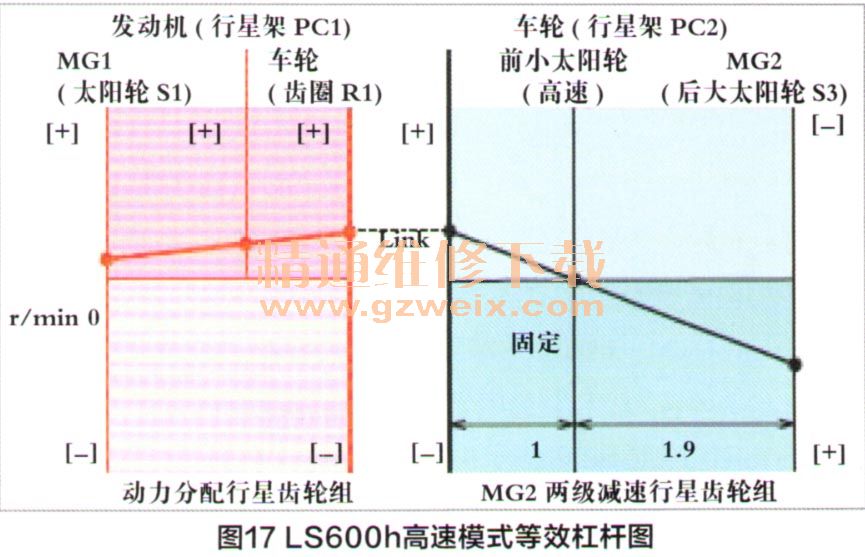
从杠杆图中可以看出雷克萨斯LS600h的ECVT构型,侧重点是在全车速范围内平衡MG2增扭效果与转速范围要求,两个传动比挡位各司其职,发挥最大的局部优势—低速挡位实现最大的增扭效果,高速挡位大幅度降低转速范围。
")
")
")
")

