9.前照灯网络拓扑图
前照灯网络拓扑图如图33所示。
BCM/GWM使用LIN与前照灯控制模块进行通信。LIN总线传输信息以向前照灯控制模块告知以下信息:

·已选择自动模式
·位置灯点亮
·日间行车灯点亮
·侧标志灯点亮
BCM通过硬接线连接与前照灯控制模块通信以实现以下功能:
·近光灯开启信号
·远光灯开启信号
·方向指不灯选择信号
前照灯控制模块使用前照灯内部算法控制静态弯道灯、自适应光束调整操作、激光辅助远光灯操作和前照灯水平调整。
前照灯控制模块直接连接到高速
(HS)控制器局域网(CAN)底盘网络并从以下部件接收信息:
·图像处理模块A(IPMA)
·防抱死制动系统控制模块(
ABS)
·动力转向控制模块(PSCM)
·雨水/光照传感器(通过
BCM/GWM)
·变速器控制模块(TCM)
·约束控制模块(RCM)
·底盘控制模块(CHCM)
前照灯控制模块A是矩阵照明系统的主控制模块。HCMA通过专用CAN网络连接到HCMB,并使用这个专用CAN网络传输用于控制LED照明芯片的信息。
照明系统使用
BCM/GWM提供的信息来选择远光灯一和近光灯操作,该系统还提供与方向指示灯操作有关的信息。如果选择了自动模式,矩阵LED照明系统可在满足正确条件时运行,使得远光灯持续开启。
TCM提供了信息来指明选择的挡位,因为激光辅助远光灯不会在汽车挂入倒车挡时运行。
对于配备自适应前部照明系统(AFS)的车辆而言,要让照明模式和静态转弯灯正常运行,需要提供转向角度雨水/光照传感器与环境光线条件有关的信息,选择自动模式时,该信息可以在环境光线足够暗的情况下自动激活近光灯。
CHCM利用位于右侧悬架部件上的前后高度传感器,通过HS CAN底盘向前照灯控制模块提供悬架高度。在所有车型上,前照灯水平调整电机都安装在前照灯装置内。它们可以根据悬架高度传感器数据调节远光灯和近光灯模块。前照灯系统上标配了动态水平调整功能。如果检测到悬架高度问题,当会有2s的延迟以改进准确度。
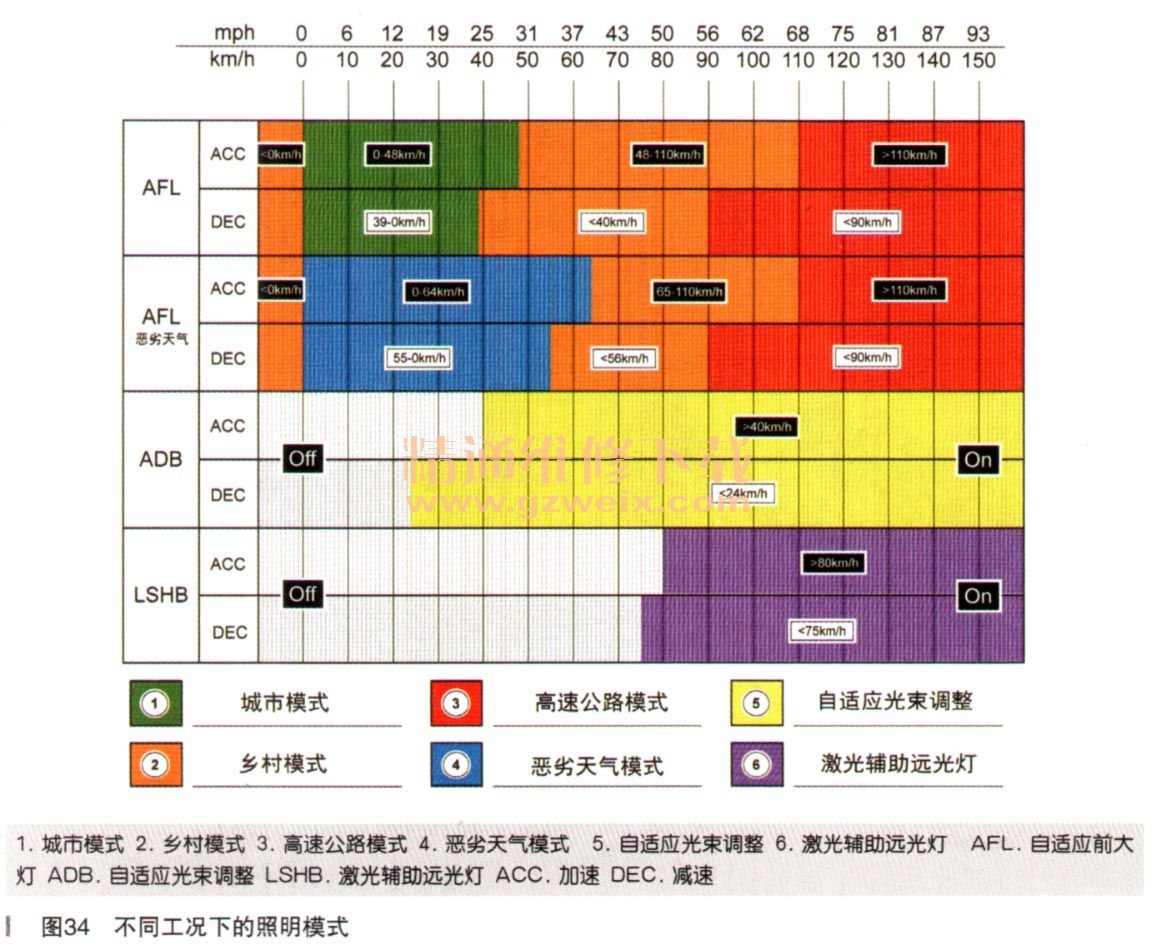
10.不同工况下的照明模式
不同工况下的照明模式如图34所示。
上一页 [1] [2] [3]
")
")
")
")

