・上一文章:2014年奥迪A1车窗玻璃无法打开或打开时发出巨响
・下一文章:奔驰9速变速器油及双离合器变速器油更换步骤
近年来与乘用车配套的行星自动变速器挡位数已从普及6挡位发展到了8至9挡位,其速比范围不断扩大,速比间隔逐渐变小,有效地改善了变速器换挡品质,提高了车辆的经济性和驾驶平顺性。
采用行星机构自动变速器后各齿轮和构件之间的运动关系(构件的速度和方向)、传动情况(传动路线和传动比)等在过去大多数文献或教学中主要采用数学解析法来计算,将行星机构运动学和动力学求解归结为解线性方程式。但这种数学解析法比较抽象,物理概念(运动关系和传力情况)不清楚,很难直观理解。而由美国通用汽车公司提出的将行星机构齿轮转换成杠杆系来进行分析,从视觉上看直观、形象、简单明了,而且也便于掌握其实质性的功能(这里应该特别提到上海同济大学黄宗益等教授已将行星机构杠杆模拟分析法发展应用在行星自动变速器的设计中,并发表了多篇专著)。转换后的杠杆系和原行星机构在运动学和动力学上的数学关系式是完全等价的。本文将以丰田皇冠8速(AA81 E型)自动变速器为例,用杠杆法分析它的各挡传动比和速度。
一、杠杆法原理
行星机构杠杆分析法是将行星机构用垂直布置的杠杆系等效替代,这样行星机构的分析转化为垂直布置的杠杆系统的分析。单行星齿轮排的等效杠杆图如图1所示。
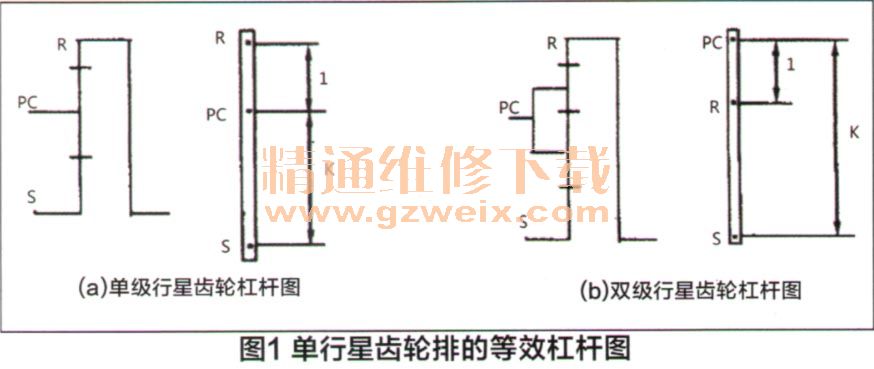
将一个行星排简化为一具有三个支点的垂直杠杆,三支点分别代表太阳轮S,行星架PC和齿圈R。其中单级行星齿轮等效轮杠杆图里的中间支点为PC,两端支点为S和R。双级行星齿轮等效杠杆图里的中间支点为R,两端支点为S和PC。根据行星齿轮机构运动特性方程推算得到,支点S到支点PC的距离与支点R到支点PC的距离之比为K/I杠杆力臂长度比),K定义为齿圈与太阳轮的齿数比。不同的是单级行星齿轮机构等效杠杆的中间支点为PC,双级行星齿轮机构等效杠杆的中间支点为R。这样以一个垂直杠杆代替一个行星排,其转速和力矩关系符合行星排的转速方程式和力矩方程式,行星排三元件的转速和转矩分别转化为等效杠杆图上支点的水平速度和水平力。
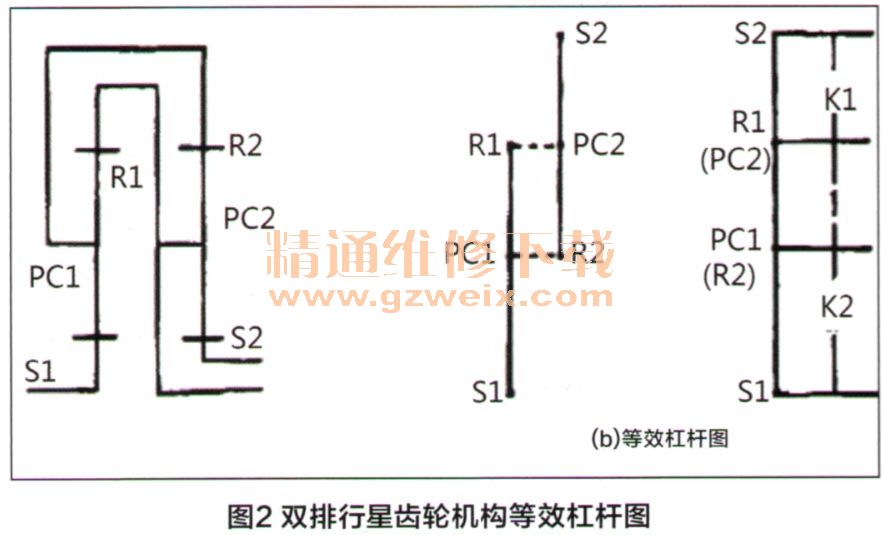
汽车自动变速器采用的行星齿轮机构一般由多排行星齿轮传动组成。多行星排并联时,每个行星排视为一个竖直的杠杆和三个支点。行星排之间的构件相互连接,在杠杆图上视为各支点之间的连接。在处理时根据需要,既可以将杠杆重叠又可以将杠杆分开。将杠杆分开时连接点用一条水平线来表示;重叠时将相互连接的部分合并为一个点。对杠杆的力臂进行调整,调整时要保证连接部分合并点之间的力臂长度相等,并且各杠杆力臂长度比不变,这样将多个行星排的杠杆图合并为一个总杠杆图。图2(a)所示为两排行星齿轮机构传动简图,其结构特点是前排的行星架与后排的齿圈相连;前排的齿圈与后排的行星架相连。两个行星排机构有三个自由度,四个独立旋转构件。设前排齿圈与太阳轮齿数比为K1,后排齿圈与太阳轮齿数比为K2。图2(b)所示为等效杠杆图,在等效杠杆图上为一个有四个支点的杠杆,杠杆力臂长度比为K2/I/K1。
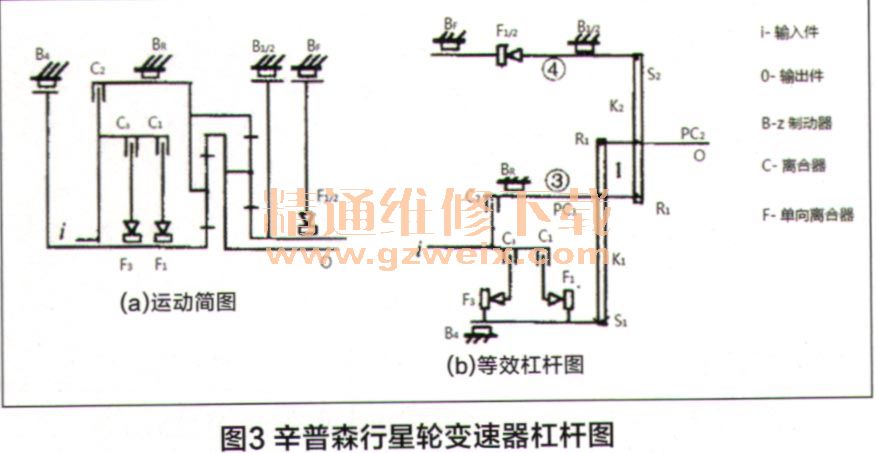
行星齿轮变速器是由行星齿轮机构加上执行元件组成。在等效杠杆图加上自动变速器执行元件(制动器、离合器和单向离合器),标注出输入和输出构件就得到了完整的行星齿轮变速器杠杆分析图。如图3所示为改进型辛普森行星齿轮机构变速器杠杆分析图,图4所示为拉维纳行星齿轮机构变速器杠杆分析图。通过已知的等效杠杆图支点间力臂距离比例和自动变速器的输入转速,用相似三角形几何方法计算出自动变速器的各个挡位的传动比和输出的转速(包括行星齿轮机构每个构件的转速)。

")
")
")
")

