①侧倾姿势控制
根据转向传感器和减速度传感器信号,控制各车轮减振器以优化转向时的车辆姿势状态。
减振器(用于侧倾抑制和弹跳抑制)位于迟滞内侧转向点,以控制2个方向的移动,4个车轮独自控制内侧和外侧转向侧的减振力,从而优化了车辆转向时的姿势并确保了抓地性能。车辆侧倾姿势控制如图35所示。
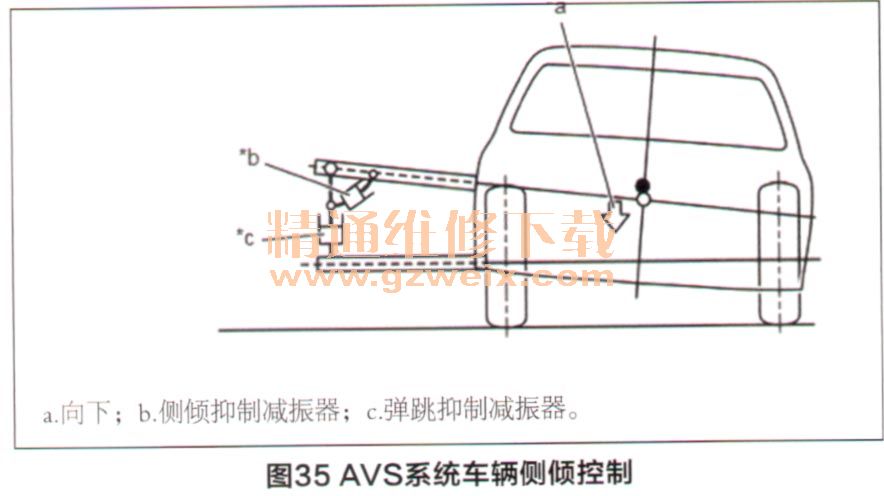
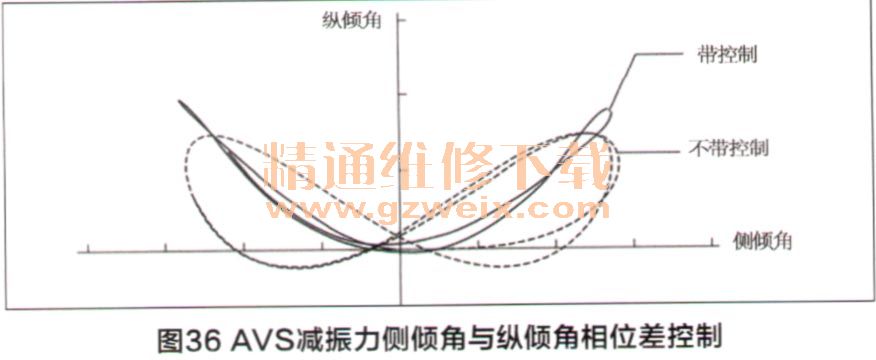
控制减振力以减少侧倾角与纵倾角之间的相位差,从而实现与人的感觉相适应的车辆姿势和舒适的转向。侧倾角与纵倾角之间的相位差如图36所示。
逗反冲控制(非线性日00控制)
根据加速度传感器信号,减振器控制
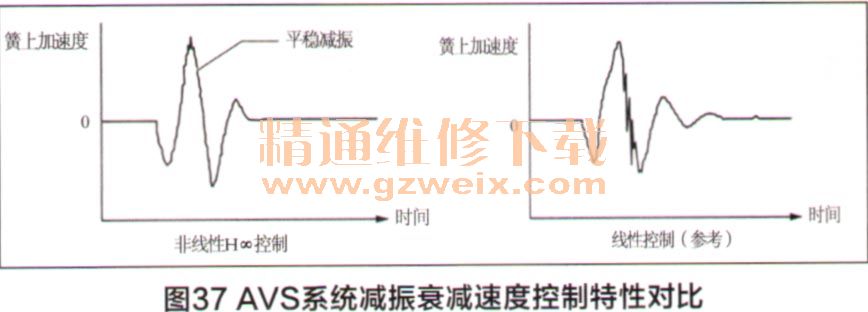
ECU检测车辆(在垂直跳动、侧倾和纵倾方向上的振动),采用非线性日00逻辑控制4个车轮的减振力。自然平稳控制车辆反冲,从而确保行驶舒适性。图37所示为AVS系统减振衰减速度控制方法特性对比。
③减振模式选择
可通过操作选择车辆行驶模式(NORMAL、 ECO、SPORT)。
在NORMAL或ECO模式中,通过根据行驶操作和路面状况进行减振力控制,优先实现了乘坐舒适性,且精确控制确保操纵稳定性。
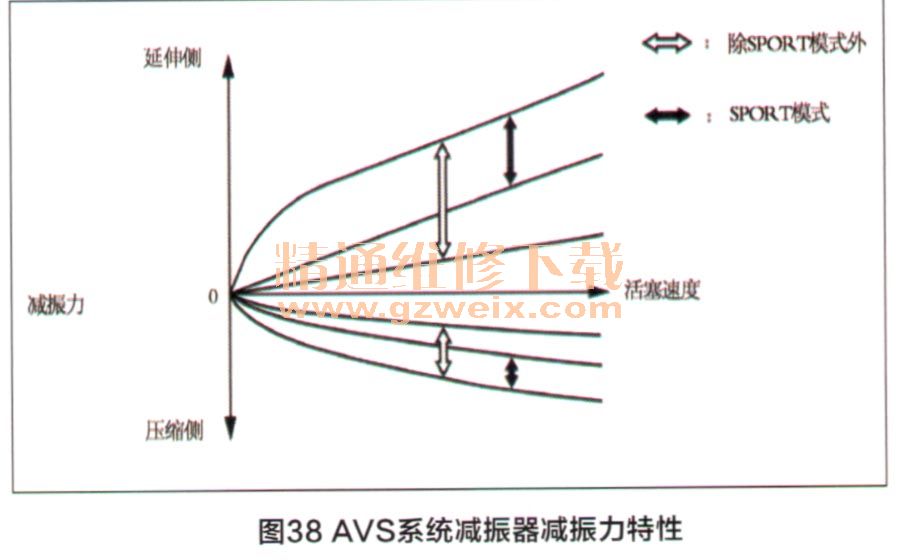
与NORMAL或ECO模式相比,SPORT模式在减振力控制采用高减振力范围,进一步提高车辆运动操纵稳定性。减振力特性如图38所示。
上一页 [1] [2] [3] 下一页
")
")
")
")

