来源:汽车维修与保养 作者:佚名 2023-02-25 08:20:52
1.基本电流
基本电流是驱动电机的基本电流值,是使用转向力矩和车速计算的。
2.惯量补偿
EPS电机扭矩会随着车辆开始移动而偏低,并随着车速因车身旋转惯性降低而偏高。为减少惯性的影响,在加速时惯性补偿会增加基本电流,并在减速时减少基本电流。惯性补偿电流通过转向扭矩、车速、电机转速来计算。
3.减振补偿
在刹车或转弯时,方向盘可能会接收到来自路面的振动。通过电机电流控制施加阻尼效果来进行阻尼补偿以减小方向盘的振动。阻尼补偿电流通过转向扭矩、车速、电机转速来计算。
4.目标电流
目标电流是进行电机反馈控制的必要值,是通过对基本电流施加惯性和阻尼补偿以及增加转向扭矩方向而确定的。
5.电流反馈控制
电流反馈控制监测通过传感器的电机电流,并减小电机电流相对于目标电流的偏差,以此来精确运行电机。
6.限位停止控制
限位停止控制降低方向盘满行程(右限位或左限位)时的电机电流,以保护系统。此值用目标电流和电机转速来确定。
7.运动模式
EPS系统有两个控制模式,对应于从PCM通过F-CAN发送的运动模式信号。
当车辆处于正常模式时,
EPS系统提供平稳且自然的转向感觉。当车辆处于运动模式时,
EPS系统提供直接且线性的转向感觉。
8.方向盘回位控制
回位控制根据转向角和车速控制方向盘的回位速度。此控制负责使方向盘回到中位。
9.转向速度反馈控制
转向速度反馈控制通过控制转向扭矩的迟滞现象提高高速范围下的稳定性。转向速度反馈控制电流是根据目标和实际转向角速度之间的偏差计算的,用于调节基本电流。
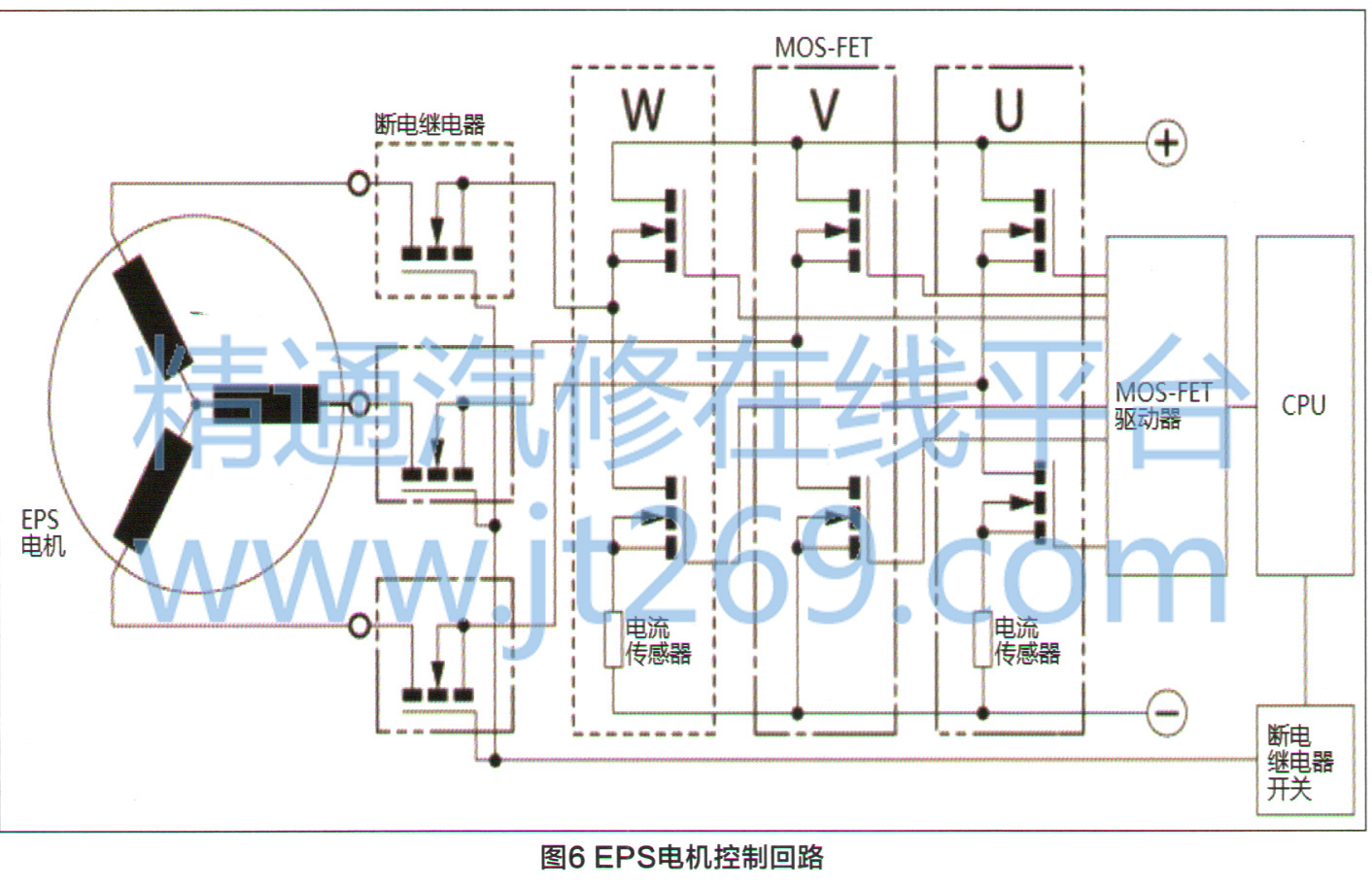
EPS电机控制电路由系统控制CPU、MOs-FET(场效应晶体管)驱动器、MOs-FET、断电继电器、断电继电器开关、电流传感器和
EPS电机组成。通过输入传感器的信号,CPU计算并根据占空比将相应的三相电流输出至FET驱动器。该操作由负荷控制,如图6所示。
11.电机输出限制控制
电机输出极限控制会在车辆停止但是反复转动方向盘时减少电机电流。此控制会逐渐减少动力转向助力。动力转向助力会从ON·m(0kg·m、01bf·ft)的转向扭矩或从车辆OFF(LOCK)模式开始逐渐恢复,最多经过20min就能够恢复到正常的助力状态。电机极限控制的激活取决于电机和控制系统内部温度。
五、转向角检测
EPS控制单元从电机转角传感器值计算转向角。
EPS控制单元通过电机转角传
六、转向角中间位置学习
当车辆转至ON模式时,
EPS控制单元学习转向角中间位置检测初始转向角。转向角中间位置学习分为初始学习和常规学习。
1.初始学习
清除了转向角中间位置后,首次行驶时将自动执行初始学习。根据各传感器信号,
EPS控制单元判断车辆在进行直线行驶时,将学习转向角中间位置。
(2)停止时的学习方法
①将车辆停在平坦、水平的路面上。
②将车辆转为READYTODRIVE(准备行驶)模式。
③将方向盘设置到中间(正前方)位置。
④如下转动方向盘:
。向左转一圈并回到原来的位置;
。向右转一圈并回到原来的位置;
。向左转1/4并回到原来的位置;
。向右转1/4并回到原来的位置;
。向左转1/4并回到原来的位置;
。向右转1/4并回到原来的位置。
⑤检查并确认指示灯熄灭。
(2)从12V蓄电池断开12V蓄电池电缆;
(4)PS控制单元电源电压减小。
3.常规学习
车辆在行驶过程中,会产生正常磨损及
车轮定位的改变,常规学习可修改中间位置的间隙。
4.使用HDS学习
使用HDS,执行了VSA系统的VSA传感器中间位置记忆,则转向角中间位置将清除并重写。
上一页 [1] [2] [3]


")
")
")
")

