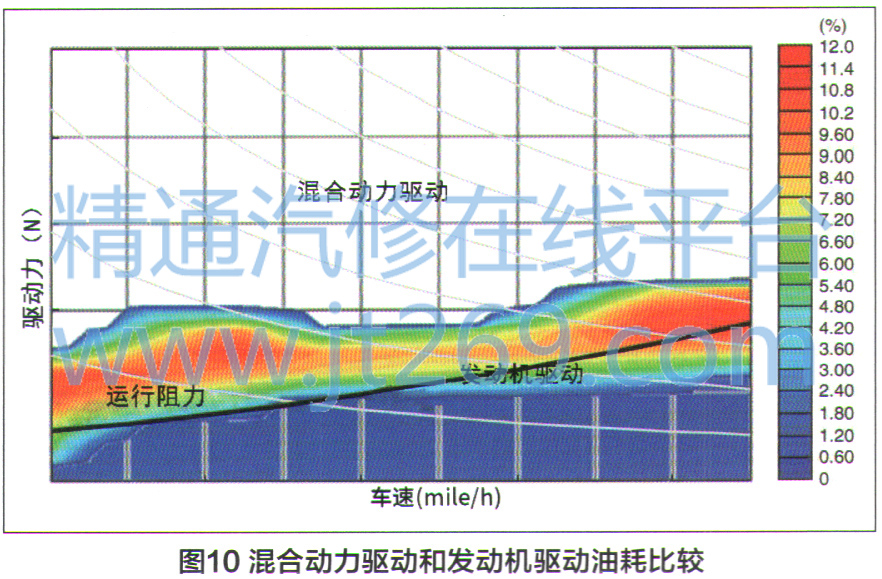
(2)在混合动力驱动和发动机驱动之间切换
图10比较了
混合动力驱动和发动机驱动的燃油经济性。图10中的彩色区域表示发动机驱动提供更好燃油经济性的区域,白色区域表示
混合动力驱动提供更好燃油经济性的区域。黑线表示在平坦道路上行驶时的行驶阻力。由此可见,从巡航开始平缓加速时,发动机驱动模式比
混合动力驱动模式具有更高的能量传递效率,因此燃油经济性性能提升高达12%。相反,
混合动力驱动模式在行驶负载较高的地区提供更好的燃油经济性。因此,基于这些关系切换
混合动力驱动模式和发动机驱动模式。
5.在限制条件下确保驾驶性能
SPORT HYBID i-MMD系统由各种组件组成,每个组件都受到约束以确保可靠性。例如,这约束包括电动机扭矩限制、发电机扭矩限制和电池功率限制。特别是关于电池电力限制,从确保铿离子电池的耐久性的观点出发,要求进行准确的控制,已知该限制对串联
混合动力系统的驱动性能产生很大影响。因此,下面使用电池功率限制作为示例来描述每个组件之间的协同控制以支持各种环境和操作条件。动力管理控制从各个部件获取驾驶员的加减速意图(油门和刹车踏板操作)以及功率和扭矩限制信息,并在限制范围内进行适当的协同功率控制。在电池电量有限的情况下,例如在低温环境下,仅靠电池电量无法满足加减速意图时,电源管理控制选择
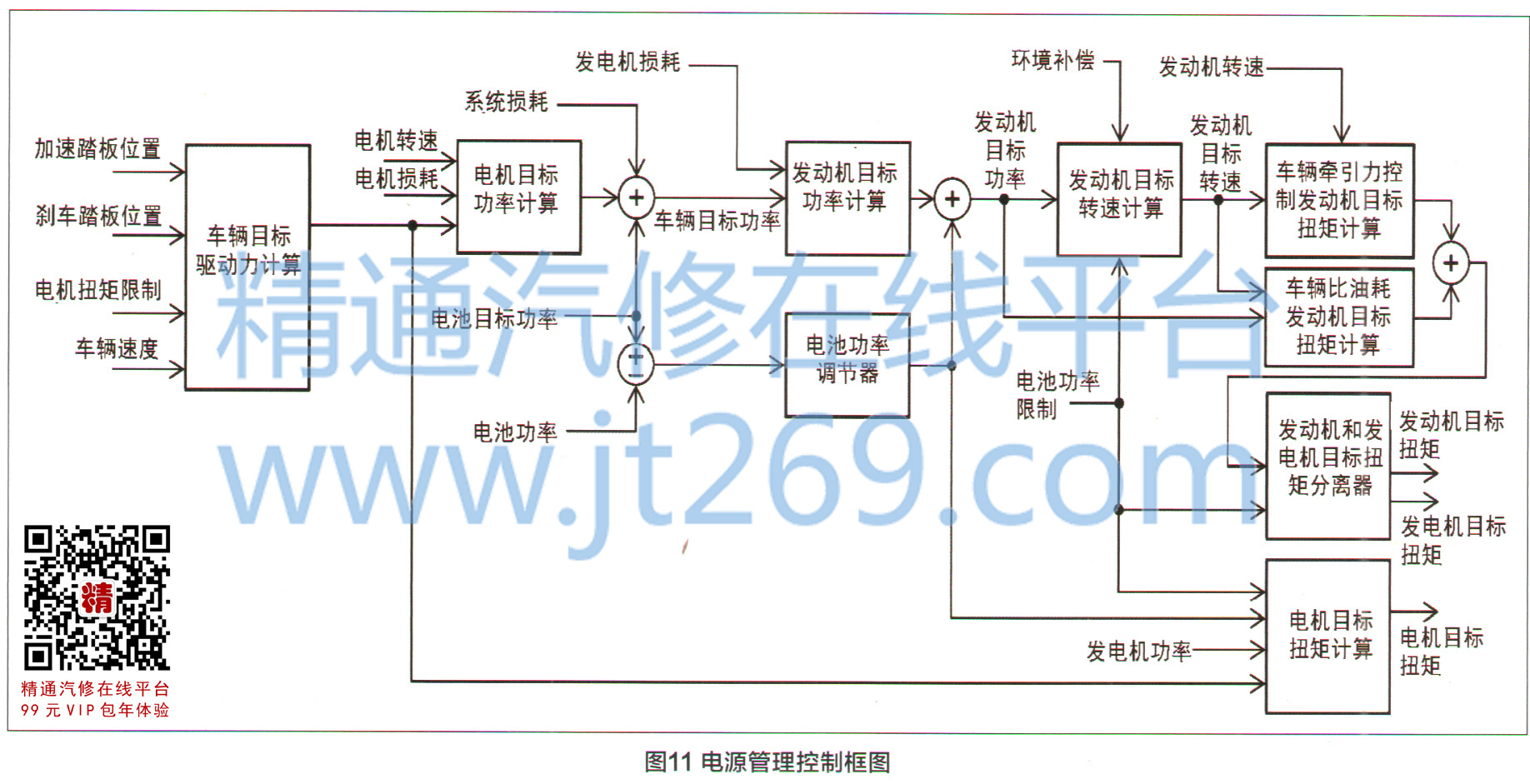
混合动力驱动模式,准确平衡电动机、发电机和发动机输出,满足电池电量限制并获得足够的驱动性能。图11所示为该控件的框图。
动力管理控制首先根据驾驶员的加减速意图和电机扭矩限制要求计算车辆目标驱动力。接下来,根据车辆目标驱动力,计算电动机目标功率,以及根据
能量管理控制计算电池的目标功率,这两者之和与相匹配的目标发动机功率。目标发动机功率再由电池功率调节器根据需要进行修正。之后,根据修正后的目标发动机功率计算目标发动机转速和目标发动机扭矩。这里,目标发动机速度和扭矩值选择在发动机效率最大化的点。最后,考虑到包括电池功率限制在内的各种约束,对发动机功率、发电机功率和电动机功率进行校正。这个控制系统平衡了驾驶员的加速和减速意图、电池SOC收敛特性、电池功率限制性能以及其他组件的约束。
在极低温度下,电池电量受到严格限制,以确保电池耐用性。为了在此限制下保持足够的驱动性能,电动机和发电机需要输出超过100kW的功率,并且还需要能够在10kW或更少的电池功率限制内保持这种功率平衡的精确控制。另外,在积雪路面等低附着力路面急速加速或减速时,会发生车轮打滑、抱死等现象,由此产生的电机转速波动会引起电机功率的急剧变化。这意味着即使在这些情况下,也需要能够将功率平衡保持在限制范围内的快速响应控制。用于实现高精度和快速响应的功率校正方法如下。
(1)估计电池电量
快速估算电池电量,要求电池电量信息的延迟或死区时间很少。电池电量可通过铿离子电池电压传感器和电流传感器测量进行估算。但是,还要考虑传感器延迟因素、电池
电容器特性、PCU内部
电容器和电抗器的特性、每个控制单元之间的通信延迟等因素。这意味着控制单元识别的电动机和发电机功率波动与电池功率波动之间存在延迟和死区时间特性。这些延迟和死区时间特性对于电池电量快速控制响应的要求是不可忽视的,因此电池电量的估算还必须间接估计电动机、发电机功率损失和其他损耗信息。图12显示了该系统的高压组件。
关键词:


")
")
")
")

