・上一文章:解析清洁度对发动机可靠性的影响
・下一文章:汽车座椅舒适性改进的方法分析
摘要:伴随着我国现代化汽车的不断升级发展,人们对于智能汽车的避障系统要求也越来越高,为了能有效防止交通事故的发生,本文将针对汽车行驶过程中的避障危险性展开评估,要能够准确地判断出汽车当前行驶状态是否会发生碰撞危险,在此基础上再判断汽车紧急制动避障措施的危险程度,进而选择一条危险性最小的避障轨迹。
1 智能汽车的避障危险评估
1.1评估方法
对于汽车的危险评估方法,一般说的是汽车司机驾驶员的意图识别,碰撞检测以及轨迹预测,避障危险评估主要是针对轨迹预测来说的。所谓的危险评估,主要是为了评估并判断目前的汽车行驶状态是不是有危险,倘若有危险的话,就需要进一步判断采取避障措施,是否需要制动、转向。因此在汽车的轨迹预测中,要能够提高短时间预测的精准度,充分考虑到汽车的运行状态以及司机的驾驶意图,进而获得汽车的不确定性轨迹分布。
1.2未来行驶轨迹预测
在对智能汽车进行未来行驶轨迹预测时,主要是从汽车运行状态以及驾驶员的驾驶意图角度来展开轨迹预测分析及最终行驶轨迹生成。汽车的轨迹预测,需要建立汽车的动力学模型,比如恒速度、恒加速度及恒角速度模型矩阵。
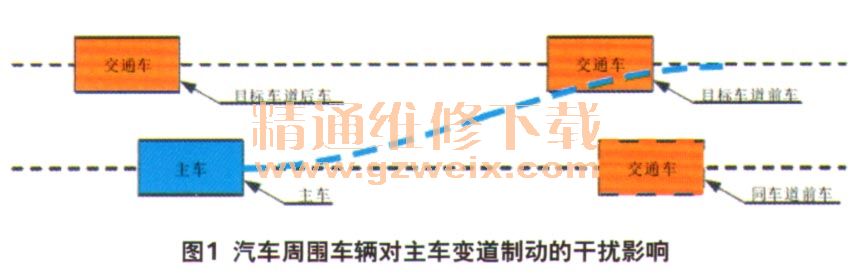
通常交通车的运行状态需要通过车载传感器获得,获得相对主车的具体位置。在对驾驶员的驾驶意图进行轨迹预测时,可能出现的驾驶行为需要结合紧急制动、轨迹行驶以及变更车道、变更车道后制动。如图1所示,从汽车现在的行驶状态,再到目标车道换位,既要考虑到之前的行驶轨迹,又要考虑到换道需求,主车在换道的时候,也能够意识到周边所有车辆及障碍物对主车的换道干扰。
1.3轨迹碰撞检测
所谓轨迹碰撞检测,主要指的是主车和其他交通车辆的行驶轨迹是否存在碰撞的危险,需要先进行确定性的轨迹碰撞检测。假如主车和其他车辆之间的行驶轨迹满足安全距离需求的话,就能够直接得出行车危险性的评估结果,不用再考碰撞轨迹的不确定性。因而在确定性的智能汽车轨迹碰撞预测中,预测轨迹的表达形式是一种时间离散化的点列位置排列,在计算的过程中,要判读两个相同时刻及两车之间的行驶距离是否满足安全距离的需要,假如两车之间的距离处在危险范围之内时,就可以确定在这一位置处主车和其他交通车辆会发生碰撞,而如果两车之间的距离在安全距离和危险距离之间的话,还需要计算不确定位置点的碰撞概率,设时间复杂度是O(n2),碰撞概率的计算公式有Pcoll(v、o)=1 /n(Svi、Soi)。
2 结构化道路避障决策
智能汽车的避障决策重点是从汽车行驶的安全性角度来说的,因此要针对汽车行驶的危险等级进行划分,通常分成安全和不安全2种,需要人为设置安全碰撞条件。当△Li=1.2v时,两车的碰撞概率是-1。如图2所示,主车在行驶的时候可能同Veh1相撞,也有可能在变道的时候同Veh2、Veh3相撞,设参数Pkmax为汽车危险等级系数,当Pkmax<Pcoll时,汽车会是安全的,汽车碰撞概率为0.2。当Pkmax>Pcoll时,汽车是危险的,汽车的碰撞概率为0.6。如果汽车的碰撞概率为0.2~0.6间,汽车是不安全的,此时就需要采取汽车避障决策,要判断是变道还是更为制动更加安全,或者是在变换车道同时伴随制动。

3 智能汽车避障轨迹规划
通常情况下汽车要采取的避障轨迹不会是一条,而是会有许多条,所以在许多条轨迹选择的时候,要选择最小的转向半径来舍去多余的轨迹。在最佳轨迹选择的时候,需要建立指标体系来评价该条轨迹的优劣,有公式Ctra=w1 Dmin/min(Dtra(t))+W2max(Aytra(t))/Aymax+w3LTra/Lmax。其中Dmin是所有轨迹和目标障碍物之间的最短距离,Aymax是轨迹的最大侧向加速度,LMax是轨迹长度的最大似值,w是权重系数,w1、2、3分别取值为1、1和0.5。根据加速度计算公式Ay=v2k,可以获得轨迹曲线的斜率。
4 结束语
综上所述,现代化的智能汽车避障系统,要可以很好地避开道路上面的动态、静态障碍物,同时还能够识别道路上实时变化的交通环境,可以根据道路障碍物及车辆的运行状态变化来及时地调整行车轨迹,可以在转向的时候发起制动,应对复杂的变化车况,证明智能汽车避障系统的有效性。





