本文主要为读者解析特斯拉自动驾驶硬件相关结构及系统组成,我将从系统发展历程、系统构成、系统工作原理、摄像头方案解析等方面进行说明。
一、特斯拉自动驾驶系统的发展
在特斯拉发展的早期,特斯拉通过采购mobileye EyeQ3芯片+摄像头的半集成方案来实现辅助驾驶功能,主要是为了满足特斯拉的快速量产需求,并且受限于研发资金不足,该阶段无法自研。
在特斯拉发展的中期,特斯拉采用高算力NVIDIA芯片平台十其他摄像头供应商的方案,在该阶段由于mobileye的产品更新迭代速度较慢,无法满足特斯拉的使用需求,特斯拉开始甩开mobileye。
当前特斯拉采用自研NPU(网络处理器)为核心的芯片+Aptina摄像头的核心自研方案,可满足特斯拉高度定制化的要求,并且后期时间和资金较为充足,公司的自研实力和开发自由度较高。
2014-2016年,特斯拉配备的是基于Mobileye EyeQ3芯片的 AutoPilot HW1.0计算平台,车上包含1个前摄像头、1个毫米波雷达、12个超声波雷达。2016-2019年,特斯拉采用基于英伟达的DRIVE PX2 AI计算平台的AutoPilot HW2.0和后续的AutoPilotHW2.5,包含8个摄像头、1个毫米波雷达、12超声波雷达。
2017年开始特斯拉开始启动自研主控芯片,尤其是主控芯片中的神经网络算法和AI处理单元全部自己完成。2019年4月,AutoPilotHW3.0平台搭载了
TeslaFSD自研版本的主控芯片,这款自动驾驶主控芯片拥有高达60亿的晶体管,每秒可完成144万亿次的计算,能同时处理每秒2 300帧的图像,硬件实拍图如图1所示。
二、特斯拉FSD HW3.0介绍
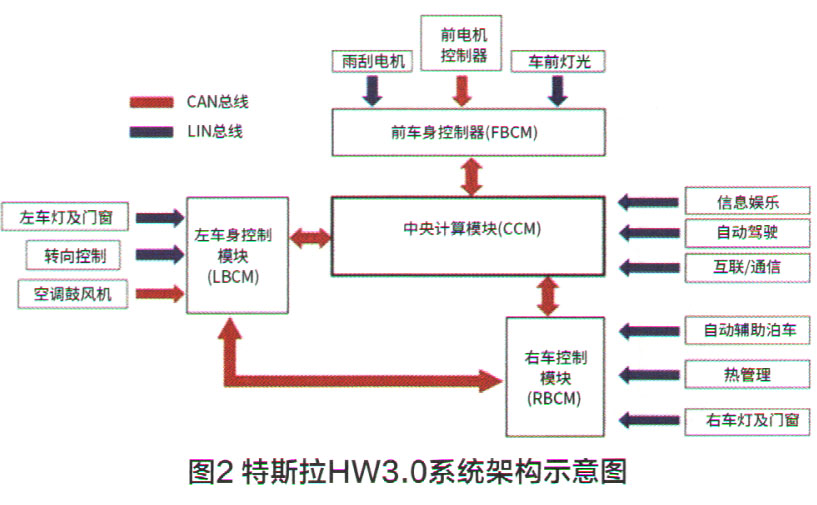
特斯拉Model 3自研“中央一区的EEA”架构:中央计算机是自动驾驶及娱乐控制模块,由两块FSD芯片构成并进行大量的数据计算,主要服务于自动驾驶功能。两个区控制器分别是右
车身控制器(
BCM RH)和左
车身控制器(
BCM LH),主要服务于热管理、扭矩控制、灯光等功能(图2)。
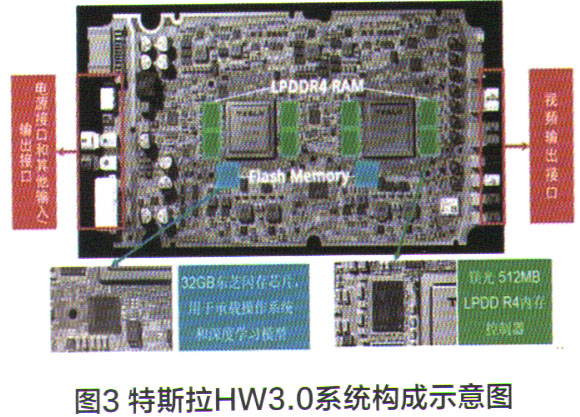
FSD的日W3.0由两个相同的计算单元构成,每个计算单元上面有特斯拉自研的2块FSD计算芯片,每块计算芯片的算力为36Tops(处理器运算能力单位,1TOPS代表处理器每秒钟可进行一万亿次(1012)操作),总算力为4x36Tops=144Tops。但是由于采用的是双机冗余的运行方式,实际可用的算力为72TOP。
特斯拉板子的右侧接口从上到下依次是FOV摄像头、环视摄像头、A柱左右摄像头、B柱左右摄像头、前视主摄像头、车内DIVIS摄像头、后摄像头、GPS同轴天线。左侧从上到下依次是第二供电和I/O接口(车身LIN网络等),以太网诊断进/出、调试USB、烧录、主供电和I/O(底盘CAN网络等)。其系统构成示意图如图3所示。
而通过特斯拉在售车型的介绍和实际配置来看,主张以摄像头视觉为核心的特斯拉安装了一个三目摄像头、四个环视摄像头、一个后置摄像头、车内DMS摄像头、前置毫米波雷达、以及12颗超声波雷达。
[1] [2] 下一页
关键词:
")
")
")
")
")
