来源:汽车维修与保养 作者:佚名 2022-02-04 16:20:12
三、模型架构
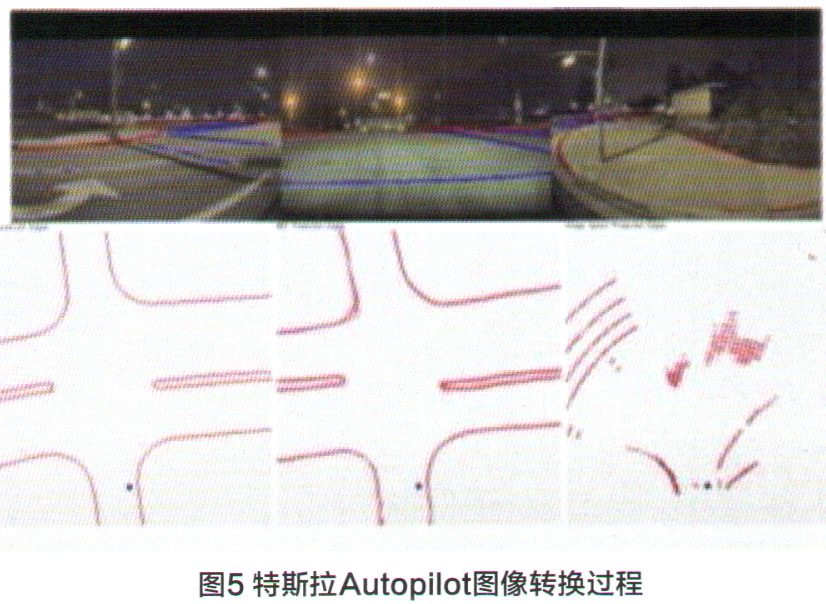
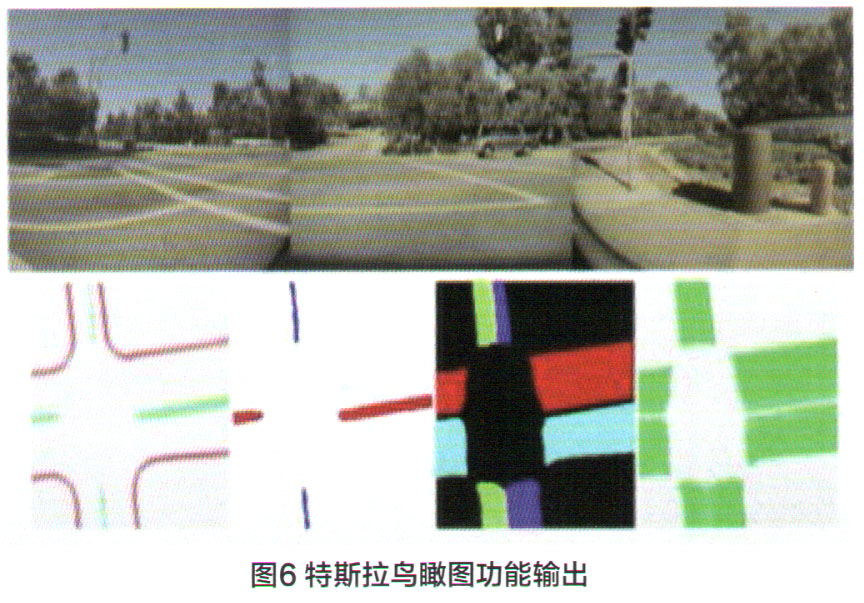
特斯拉的各个相机是一种松tER41*3合的状态,即各个相机单独进行感知,然后把不同相机的感知结果通过滤波器或者其他技术进行拼接。特斯拉在其Autopilot2.0系统中针对8个相机的特征层(Feature layer)输入了融合层来对特征层进行融合,随后得到鸟瞰图,最终在鸟瞰图的基础上再进行目标检测、道路分割、边缘检测等功能输出。如图5和图6所示。
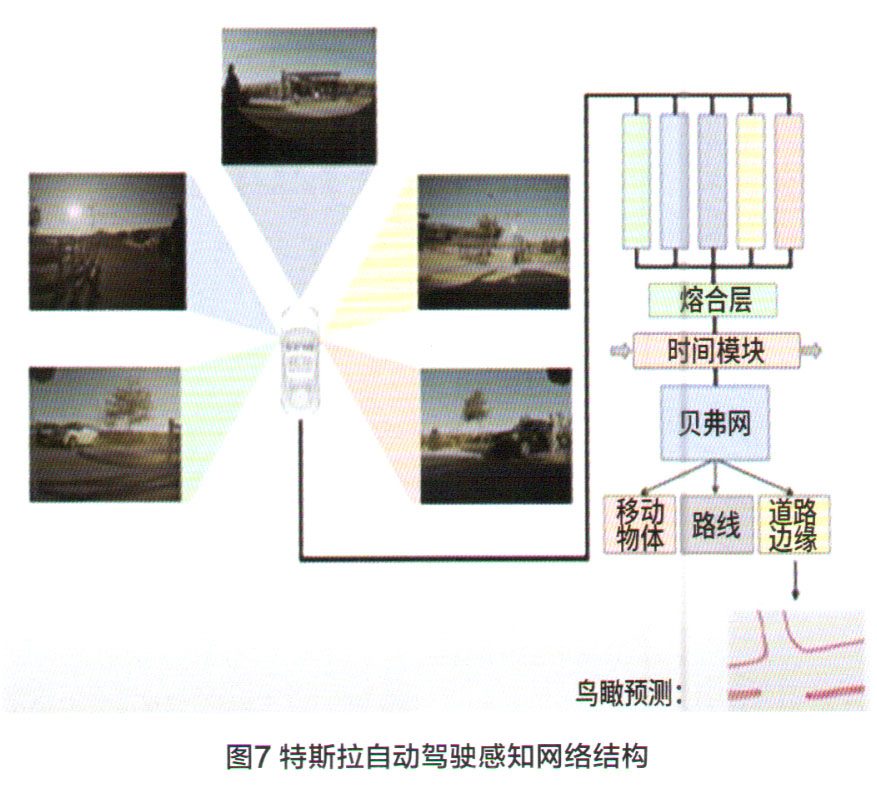
特斯拉的Autopilot系统使用了规模巨大的多神经网络结构,不同相机根据不同的网络负责不同功能,并且不同网络引入RNN神经网络实现了跨时间的感知任务。前摄像头模组可以感知车道线并且进行目标跟踪,日柱摄像头和侧翼子板摄像头可以结合上一时刻的图像输入以及本时刻的图像输入一起负责对于加塞工况的判断,并且与前摄像头模组是跨时间的任务组合配合。特斯拉的无人驾驶除了图像检测之外,还有很多训练功能网络,包括图像深度估计网络、坐标投影网络、道路元素及布局推理网络、道路元素关联网络。利用上述网络特斯拉可以更方便的进行模型感知及推理。特斯拉自动驾驶的感知网络结构如图7所示。
FSD计算平台处理完摄像头的数据后,将数据传输给负责车辆控制的模块,车辆控制模块根据摄像头识别的结果,控制车辆的方向盘转角、油门、刹车、转向灯等来控制车辆。
关键词:
")
")
")
")
")
