・上一文章:大众对农业机械及农业机械化的几点认知错误
・下一文章:基于“互联网+”黑木耳菌袋窝口插棒一体机营销模式研究
6 实验部分
6.1太阳能温差发电部分
太阳能温差试验部分利用凸透镜进行聚光,经过聚光后转换成热能后提高温差发电器热端的温度,冷源部分的传热元件是扁平热管,利用化学反应散热,增大温差发电器冷源和热端温差,来提高装置的输出功率和热电转换的效率。对基于凸透镜与扁平热管水冷散热的聚光太阳能温差发电装置进行试验研究,结果表明,随着冷却水流量的增加,装置输出功率得到提高,当冷却水流量达到1 L/min后,输出功率逐渐平缓,随着温差的增大装置的最佳匹配负载也逐渐增加。在试验过程中,装置的最大输出功率为3.2 W,平均输出功率为2.7 W,实验过程发出电量23.3 W·h,热电转换效率最大为5%,装置最大效率4%。
6.2智能循迹避障部分
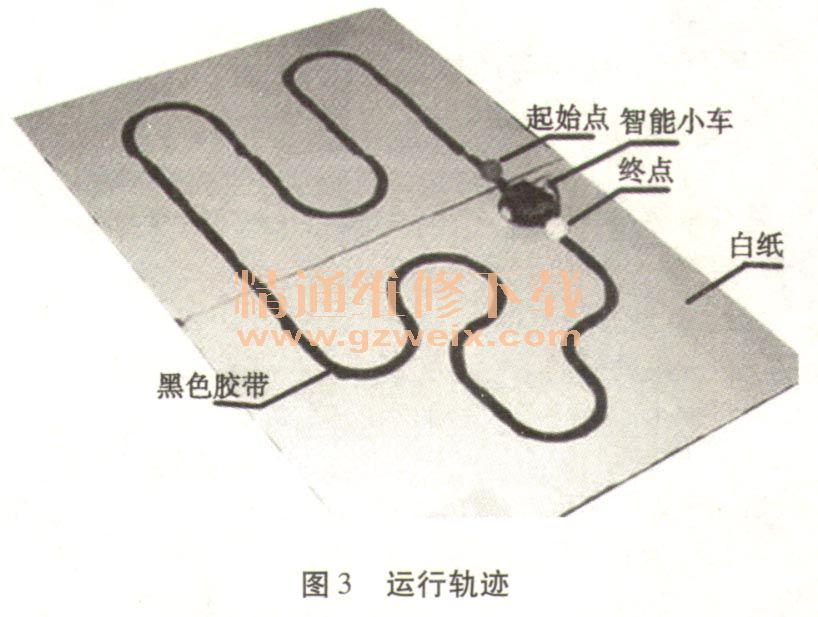
太阳能温差发电智能循迹避障小车是由复杂集成传感器的技术、环境感知的功能和自动驾驶技术与传感、信息、通信、导航、人工智能及自动控制组成。主要思想是使用汽车模型对线阵CCD道路信息的采集,通过AT89C51单片机收集信息,利用AT89C51单片机一定的算法,来控制模型车的运动状态。
从起始点到终点(如图3),中间有三个标志点(位置任意),每检测到一个标志点机器人停留5S再前进。
7 结论
太阳能温差发电智能循迹避障小车系统的设计以AT89C51单片机为核心,利用了红外线传感器、超声波传感器,将AT89 C51单片机、印制电路板、激光传感器相结合,利用温差发电装置进行发电。本实验已实现了如下功能:
(1)小车可以自动沿正确轨道行驶,在行驶过程中,能够自动检测预先设计好的轨道,实现直线和转弯轨道的前进功能。若有偏差,能够自动纠正,返回到正确轨道上来。
(2)当小车在前进过程中遇到障碍物时,可以自动调整,绕过障碍区域,从安全区域通过。小车通过障碍区域后,能够行驶到原来的轨道上,实现自动循迹。
(3)由于太阳能和冷源的化学反应实现热能向电能的转换,从而可直接给小车提供电源,让其运动。
从实验结果来看循迹的效果比较好,避障的效果也很不错,但本设计还有巨大的发挥空间,我相信如果实验条件和时间的允许下,肯定能进一步的对本设计进行完善。





