・上一文章:雷克萨斯LS430轿车发动机转速无法上升
・下一文章:智能变电站综合自动化系统设计与实现
摘要:本文从系统概况、结构与硬件选型、PLC与DCS的通信系统应用以及应用效果评析等环节,结合实例针对基于工业以太网的多台西门子PLC与DCS的通信系统进行了研究分析,具有一定借鉴价值与参考意义。
1 系统概况
某电厂除尘系统应用西门子PLC控制器进行相应的工况参数获取和操作控制指令传达,以控制相应的仪表开关,同时结合监测设备获取除尘信息。该控制系统由3台西门子PLC及相应继电器与信号传递器件构成,操控端为基于WinCC软件操作平台的集控端,在工业以太网构架中实现系统整体控制功能。从该电厂除尘效果监测实际需求出发,DCS需要依托相应感应设备获取粉尘参数,并通过西门子PLC传输监控过程中采集的相应数据,在集控中心交互端进行显示从而为控制指令的下达提供相应参考依据,因此需要保证数据采集的准确性与信号传输稳定性。同时,该电厂除尘系统控制设备来自多个工业自动化生产企业,设备信号传输过程中应维持相应的协议一致性。基于上述考虑,该通信系统工业以太网络以DCS端为核心,其它信号采集与传输设备控制系统围绕DCS端展开。
2 系统结构与硬件选型
该电厂除尘系统工业以太网通信系统中,要实现PLC与DCS的通信,同时DCS端通信为Modbus模式,DCS端为主站,因此PLC还需要配置Modbus通信片。PLC系统较为典型的应用形式为各自独立控制相应自动化设备,PLC之间不存在信号传输,因此要实现DCS通信则需要为3个西门子PLC各自配备1个通信片。这样无疑使得整个控制通信系统组件数量较多,通信过程较为复杂,出现故障的几率升高,整体结构体量与成本大大提升。而该电厂除尘系统整体信号传输量并不大,且在PLC通信过程中仅执行向DCS端的上传过程,同时相应的除尘设备呈联动作用,闭环控制环节已嵌入工业以太网框架之内,因此可考虑对通信系统结构进行优化。首先将3台PLC上除尘采集信息数据在靠近DCS端进行汇总,再通过该台PLC的模块将数据传送给DCS,从而减少硬件投入和通信线路。
3 通信系统应用
该电厂除尘系统工业以太网通信系统应用主要涉及CP连接和PLC通信两部分,此过程依托TCP/IP协议进行数据传输。TCP/IP是当前应用最为广泛的通信协议,西门子的工业以太网片支持TCP/IP协议。CP连接过程作用于PLC之间的信息传输,通过相应编程软件进行模块化处理,按照TCP或UDP准则进行数据交换。在此过程中,CP应用层有效实现了TCP数据协议传输的安全保护,只有在确认工业以太网传输环境安全后才进行数据传输连接;出现故障问题时则延时应答,待故障排除后进行通信状态检测,符合通信标准后进行PLC数据传输确认,并实施连接。该电厂除尘工序现场工况参数采集信息较为关键,应全面保证通信过程的稳定性与安全性,因此选择面向连接的TCP通信方式。
4 通信系统的组成
4.1通信系统结构
该电厂除尘系统工业以太网通信系统主要由DCS集散控制系统和西门子系列PLC组成,如图1(除西门子PLC之外未显示其它现场设备)所示。DCS集散控制系统组成的系统上位机实现集中监控;西门子PLC组成的下机位实现现场的信息采集,检测设备的启停控制,传感器、变频器、智能开关、现场电机的执行等,以及现场智能仪表的操作。

4.2通信网络组成
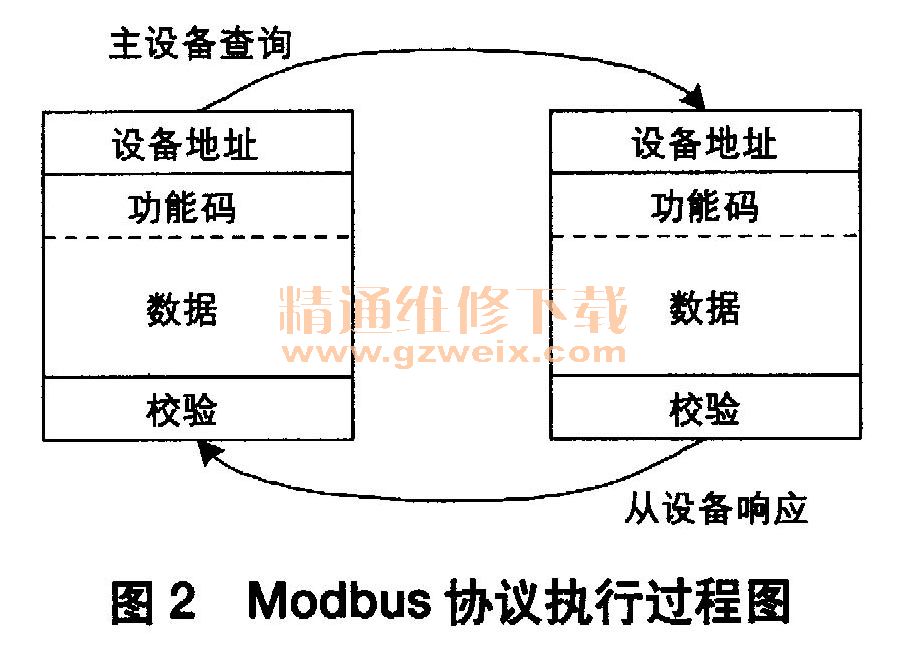
系统通信网络以工业控制构架为基础,信道地址范围为1~247,能充分满足工业控制过程的通信需求。信息传输过程实现了全面的自动化,双向信息传递接收端执行Modbus协议。这种通信协议模式由个体设备查询与系统广播查询功能构成,二者的区别主要在于个体设备查询过程中需要获取设备的回应信息才算完成通信,而系统广播查询则仅需完成信息的传达即可。Modbus协议的具体执行过程如图2所示。
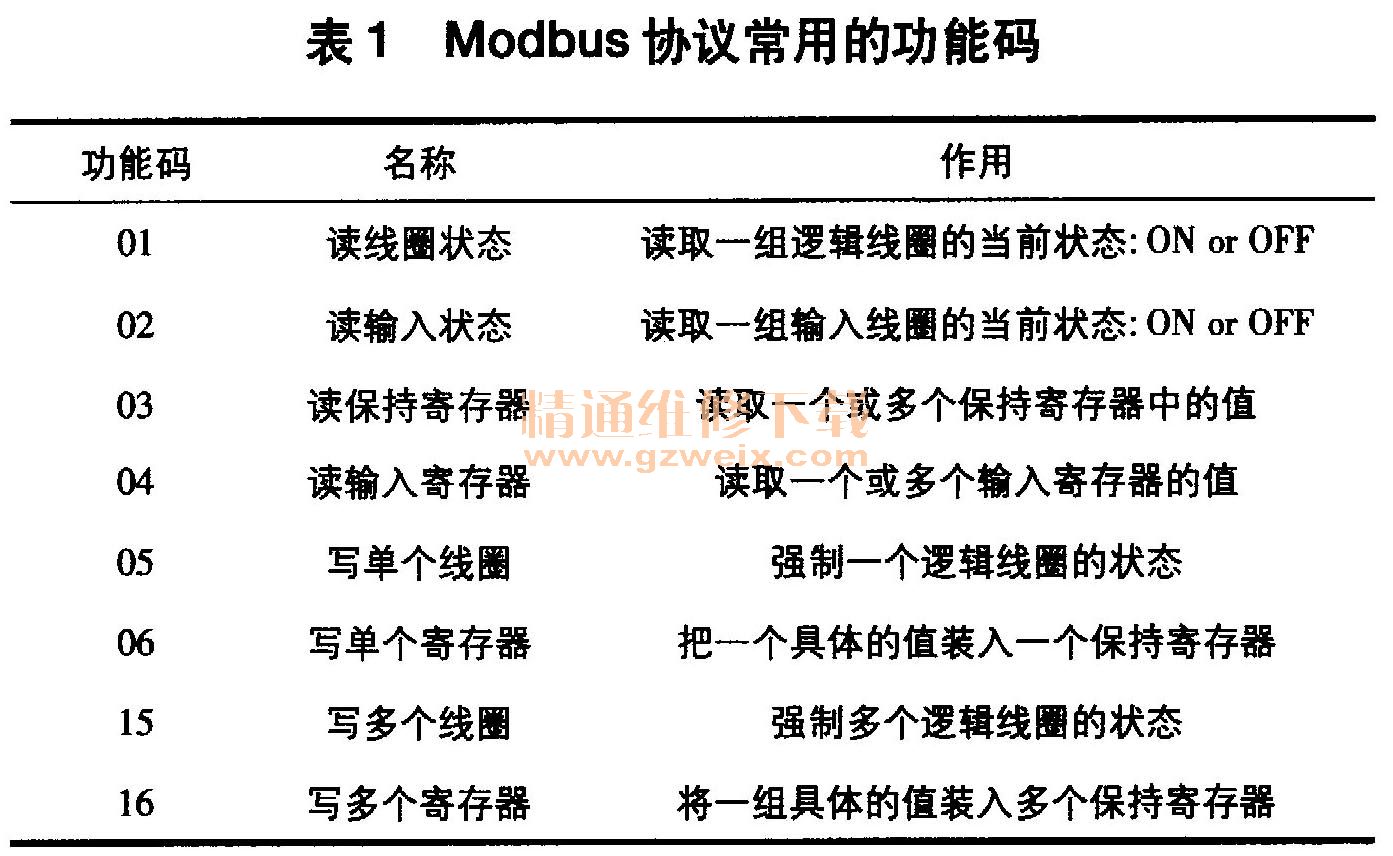
Modbus协议执行过程中的功能代码见表1。
信息通信协议的主要模式为RTU模式和ASCII模式。基于工业网信息传输的信号稳定性与传输效率考量,该系统执行Modbus协议时采用RTU模式。RTU模式通信报文格式如图3所示。
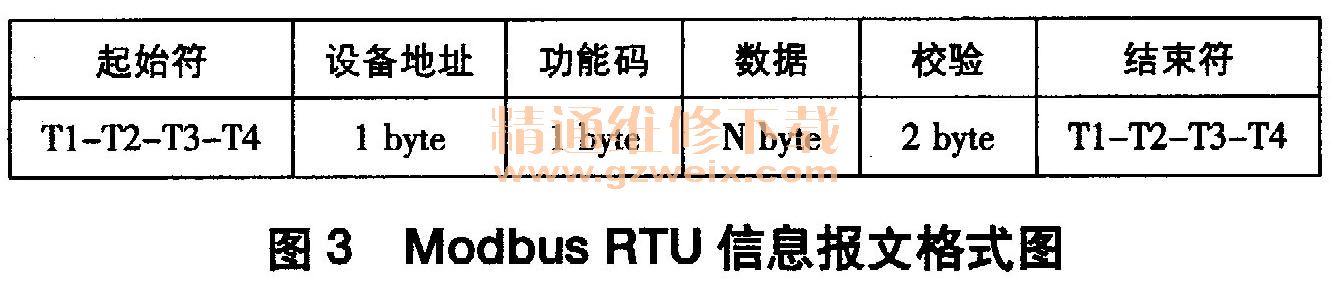
在RTU通信模式下,命令报文的执行没有相对明确的起始位和停止位,命令执行的启动与停止通过3. 5个字符以上的间隔时间进行区分。而报文涵盖的信息内容对应的信息帧则由16进制的字符0~9和A-F构成。执行Modbus通信协议的RTU模式信息帧结构如图4所示。

执行Modbus通信协议的RTU模式从工业网信息主站进行信息数据的读取,其设备查询格式如图5所示,相应的设备相应信息格式如图6所示。







