・上一文章:小水电接入对新平电网继电保护的影响
・下一文章:变电站110kV备自投装置事故反思及改进措施
摘要:本文针对传统视频画面滤波算法不能适用复杂的变电站环境的问题,采用改进的多重滤波算法,并对改进滤波算法的步骤、具体实现方式进行了说明。仿真和实际证明,该算法具有简洁高效、动态目标识别准确、定位精度高等特性,使变电站作业安全管控系统实现了实用化,提升了变电站作业安全管控的水平,具有良好应用前景。
0 引言
长期以来,如何采用现代化的技术手段对变电站作业安全进行事先的、全自动化的管控一直是业内的困扰。随着智能电网建设的推进,采用基于计算机视觉定位技术的变电站作业安全管控系统,有效地解决了这方面的难题。通过摄像机的视频画面对变电站内的动态目标进行快速捕捉和准确识别、定位是实现变电站作业安全管控自动化功能的基础。然而,在变电站作业安全管控的实际应用中,采集视频画面的摄像头常因架设原因,受到风吹、车辆、站内或周边震动等因素影响而使采集的图像产生抖动,并且因自然环境因素还存在着光线、电磁等随机干扰。
多年来对于图像采集的滤波提出了不少算法,但均不能适用于变电站的复杂环境。本文针对变电站特殊环境,在传统画面滤波算法基础上进行了大量的试验改进,以滤除变电站环境下的画面随机干扰,准确捕捉画面图像中的动态目标并对其实时定位,使变电站作业安全管控系统实现实用化。
1 变电站作业安全管控系统中的动态目标捕捉
在图像接收和处理中,画面动态目标的捕捉是计算机视觉研究中的热点,也是人工智能领域中的关键技术,是让计算机学会看的关键技术之一。传统意义上,成像系统在获取图像后首先要进行预处理,以消除图像背景及系统噪声的干扰,这有利于后续的图像综合处理,从而降低目标识别等关键任务的复杂度。其中滤波处理是主要手段。
已有大量文献针对点目标提出了高通滤波、Robinson滤波、匹配滤波、神经网络、小波变换、分形滤波、形态滤波等滤波算法。预处理后的图像主要保留了点目标和孤立的高频噪声点。对于面目标来说,主要以能有效消除噪声并保留图像细节的滤波为主,如中值滤波、均值滤波等。对于需持续跟踪目标的成像系统,目标在成像面上的大小会随着跟踪距离的变化而不同,因此图像上呈现的目标会在点与面之间变化。现有视频动态目标捕捉方法中,对点目标与面目标的图像信号分别采用两种不同的预处理算法及其处理方法,在工程应用时会增加动态目标的图像处理或识别系统的复杂度,延长系统的响应时间,降低系统的实时性。特别是现有的图像检测系统通常需要借助双目摄像机才可实现较为精确的滤波,而多数实际应用场景所使用的都是单目摄像机。在这种应用背景下,如果使用动态目标捕捉技术将无法对摄像机抖动、光线变化、无效目标闪现等随机干扰进行排除,从而导致目标丢失、记录多余无效目标等错误,在高危场所更有因时间的疏忽而导致不可挽回的后果的可能。
在变电站环境下,由于空间和位置的限制,绝大多数区域只能配置单目摄像机,而且存在着复杂的干扰,摄像机的振动及复杂的光或电的干扰会使画面模糊不清,因此研究单目摄像机的视频动态目标捕捉对变电站作业安全管控系统的实用化就具有非常重要的意义。
2 处理流程
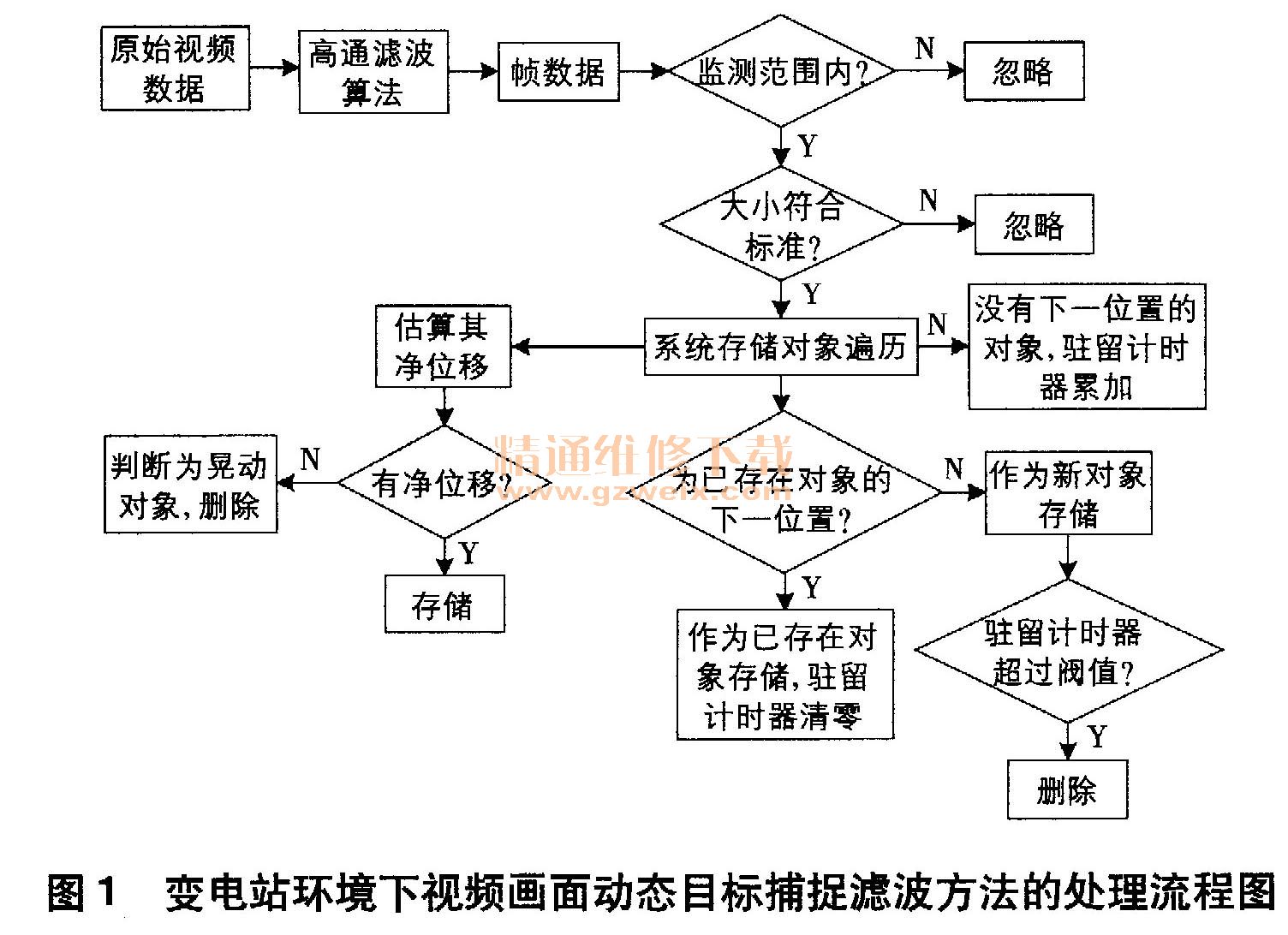
基于以上背景,本文提出一种基于单目摄像机的视频画面动态目标捕捉的图像信号滤波方法,以提高变电站环境下单目摄像机在画面动态目标捕捉信号的准确性。视频动态目标捕捉的图像信号滤波方法具体步骤如下。
(1)首先对摄像画面进行动态目标提取,然后进行第一级高通滤波,以提高画面的成像质量,排除部分干扰信号、噪点等。
(2)在第一级滤波的基础上,根据图像信号以捕捉人、车辆等主要动态目标为目的,进行第二级滤波,以排除其它干扰。第二级滤波方法包括以下逻辑判断步骤。
①对于得到的代表动态目标的帧数据,首先进行大小和范围的判别,只有满足在监测范围内,并且大小符合人、车标准的对象才进行进一步的过滤,其余数据被忽略。
②查找数据库中的已存在对象,如果该对象的位置满足标准,即符合已存在对象的下一时刻位置,那么就将该对象按照已存在的对象存储。
③按照上述标准,对于没有新位置数据的已存在对象,累加其驻留计时器,当驻留计时器超过阈值时则判断为已静止的物体,删除该对象;对于有新位置数据的已存在对象,驻留计时器清零。
④如果新对象找不到已存在对象与其匹配,那么该对象作为新对象存储,对象总数量增加。
⑤核算已存在对象的净位移,如果净位移过小,判断为晃动对象,那么删除。
该滤波方法实际是一种针对画面不同对象特征,根据动态目标需要而进行的逻辑判断及相应的处理。与现有技术中画面预处理所应用到的滤波算法不同,该滤波方法是一种更加侧重于类似人工智能的逻辑判别方法。该滤波方法对变电站内动态目标的捕捉及随机干扰的滤除,是根据其不同种类采用不同的滤除方式,从而使得对点目标与面目标的图像信号都采用同一种的预处理算法及处理方法,即在单目摄像机监视范围内能对摄像机抖动、光线变化、无效目标闪现、电磁干扰等随机干扰进行滤除,从而使得动态目标不会丢失,不会存在记录多余无效动态目标等错误,且监测信息准确,适合在高危场所使用。其处理工作流程如图1所示。