・上一文章:三芯配电电缆非侵入式取电装置的设计与制作
・下一文章:10kv开关柜局部放电异常缺陷分析与处理
摘要:本文分析了基于ABB技术的高压直流输电工程中换流变有载调压分接头的控制原理及逻辑,并对运行过程中几种典型的分接头故障原因进行了探讨,对提高直流输电系统的运维水平及分接头故障的快速定位具有一定的参考价值。
在高压直流输电系统中对系统电压的控制和调节主要是通过快速调节换流器的触发角来实现的,另外还可通过调节换流变的有载调压分接头对系统阀侧电压进行控制,从而减小换流变交流网侧电压波动对直流系统的影响,保证触发角运行在适当的范围内,使得系统运行具有较高稳定性和经济性。
在国内现有的±500kV高压直流输电系统中,国家电网多采用基于ABB技术的直流输电控制系统及相关设备,南方电网公司则多采用基于SIEMENS技术的直流输电控制系统及相关设备。本文以三广直流输电工程为例,就ABB技术下的换流变有载调压分接开关控制(TCC)原理进行阐述,并结合实例对换流变分接头的典型故障进行了分析。
1 换流变分接头基本控制原理
典型ABB技术的士50okV高压直流输电系统中,换流变有载调压分接开关采用的调节方式是保持控制角处于一定范围内,即维持触发角a、熄弧角Y以及直流电压矶在给定的参考值下,并由极控系统中的TCC系统对其进行控制。
这种分接头调节方式可使换流器正常运行于较小的控制角范围内,直流电压的变化主要由换流变的分接头调节进行补偿。该方式下,系统吸收的无功较少,阀阻尼回路损耗小,交直流谐波分量也较小,即直流系统的运行性能较好,但会导致分接头动作频繁且需要具有较大的调节范围。
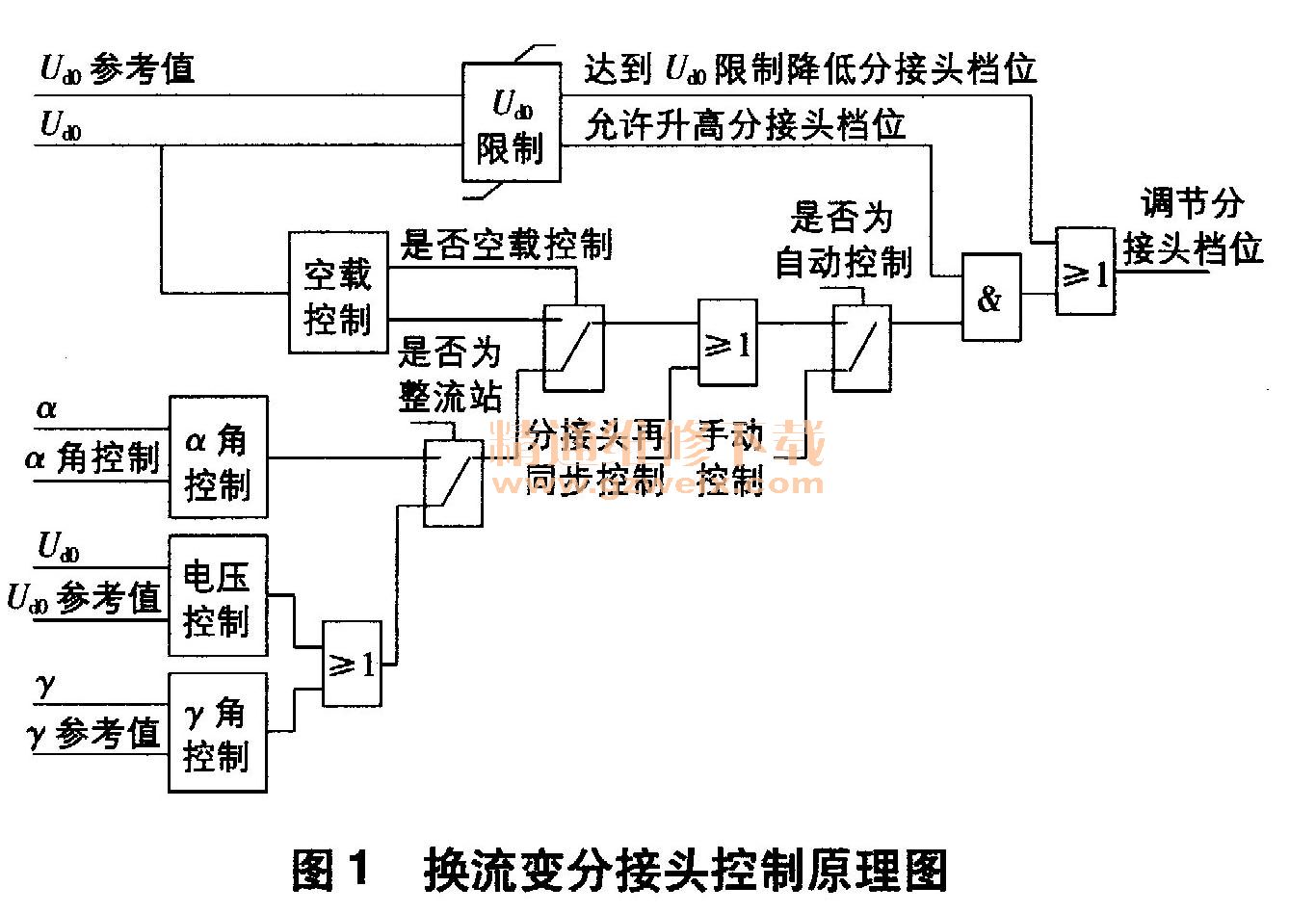
换流变分接头控制原理如图1所示。在分接头控制过程中,控制角(整流侧为触发角a,逆变侧为熄弧角Y)或直流电压测量值需要与由电压和角度参考值计算器(VARC)计算出的控制角或直流电压参考值进行比较。若控制角或直流电压测量值超过其参考定值的上限或下限,TCC系统将根据实际情况向换流变电子控制系统(ETCS)发出相应指令,以降低或升高换流变分接头的档位,使得控制角或直流电压保持在参考值下叫。另外,与控制角快速控制方式不同,分接头控制是逐级(江陵站每个步进为1.25%,鹅城站每个步进为1. 193%)、慢速(每个步进为5~10s)进行调节的,需要设定一定的动作延迟,以防止控制角瞬时超限值时分接头频繁动作。
2 换流变分接头控制模式
2.1自动控制模式
2.1.1空载控制模式
在换流阀闭锁或开线试验(OLT)时,分接头将处于空载控制模式。本文利用HIDRAW软件对ABB技术下的TCC控制原理进行分析,其空载控制逻辑如图2所示。
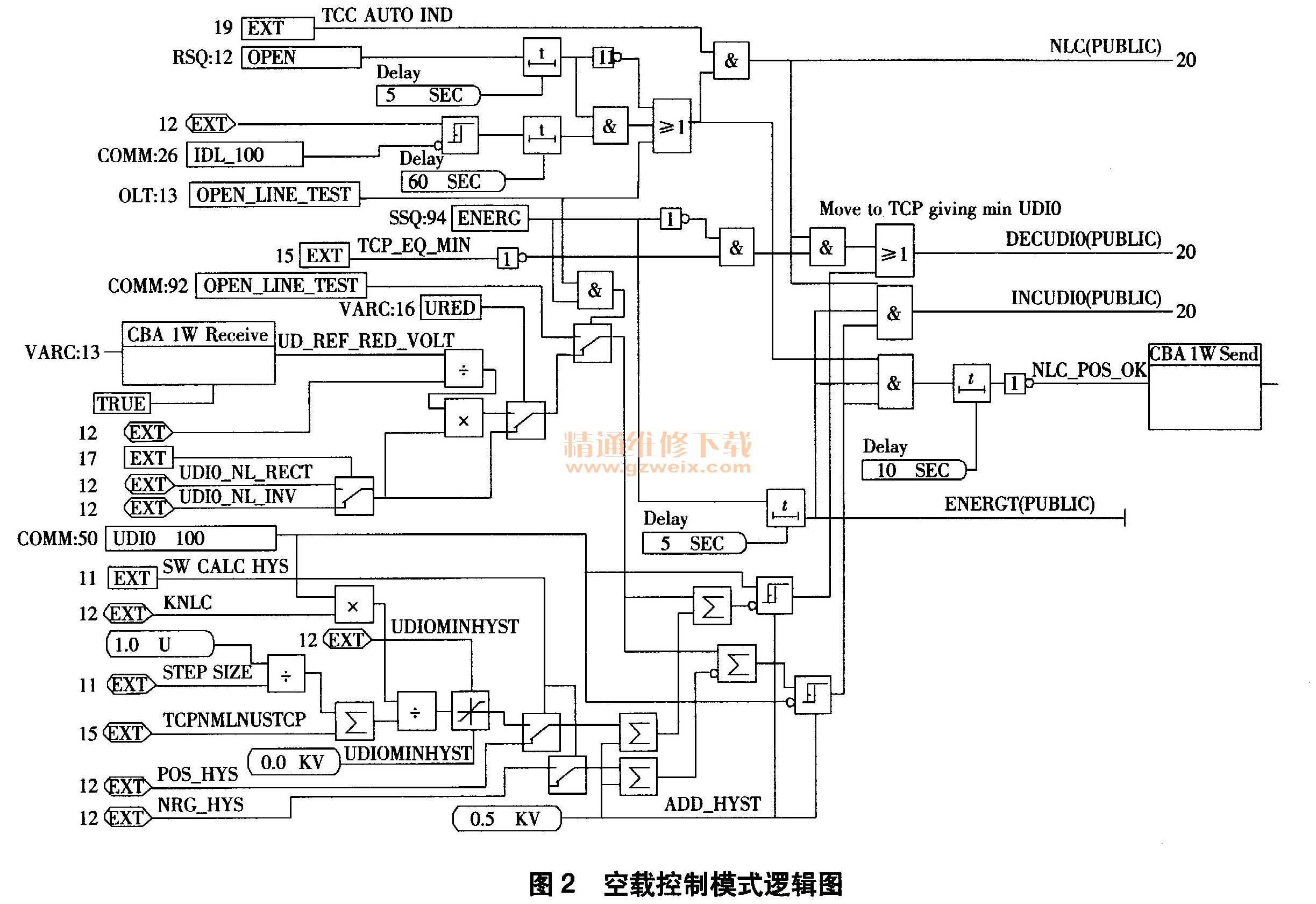
(1)由图1可知,当直流系统处于空载运行工况,且换流变未充电时,若分接头档位不在最小档位,则图中DECUDIO出口信号将置“1”,从而使得分接头档位降至最低。
(2)直流系统处于OLT试验时,当直流理想空载电压计算值Udi0_100(经100ms滤波的Udi0值)小于定值K1,则分接头自动增档,从而提高Udi0_100;当Udi0_10。大于定值K2、则分接头自动减档,继而减小Udi0_100。Udi0_100及K1、K2计算如下:
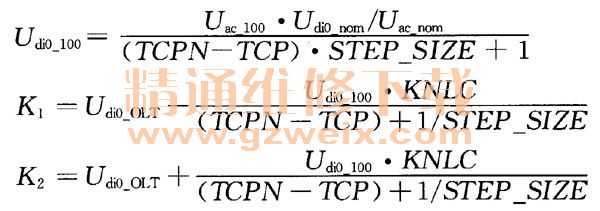
式中,Uac_100为100ms滤波的换流变交流侧电压值;Udio_nom 、 Uac_nom分别为当前直流空载电压和交流侧电压值;Udi0_OLT为OLT试验设定电压值;KNLC为迟滞值(取0.75); STEP-SIZE为分接头步进值(取1. 193%);TCPN、TCP为分接头参考位置及现在位置。
(3)若直流系统单侧换流阀解锁时,Udi0_100小于定值K3,则分接头自动增档,从而提高Udi0_ 100 ; Udi0_100大于定值K4,则分接头自动减档,继而减小Udio_100 o K3 、 K4计算如下:
式中,UD_red_ref为降压启动参考值,由VARC计算得到;UD10_NL_RECT为 261. 6kV(逆变站为262. 1kV) ; UD_Nom为当前直流空载电压值。
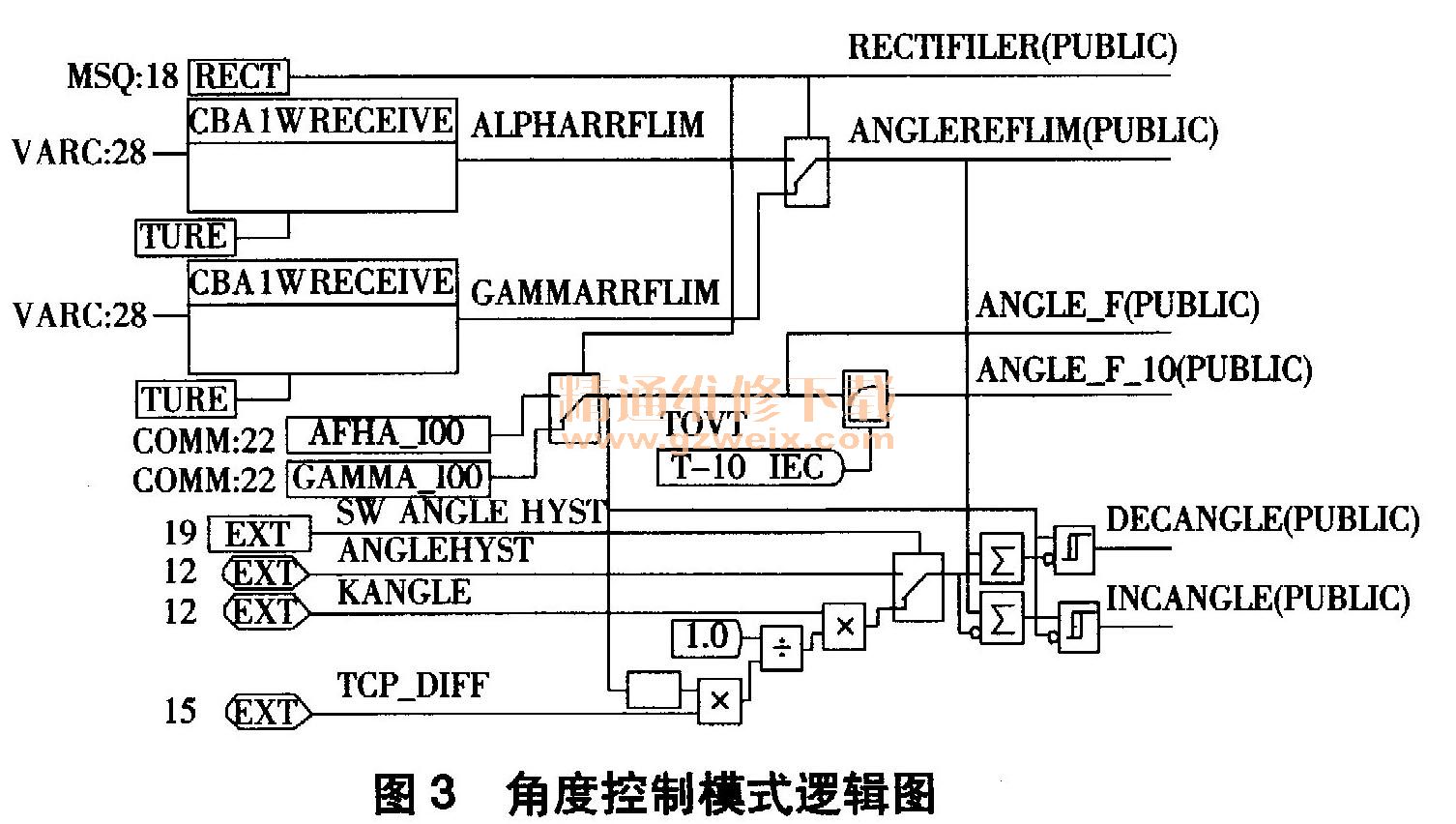
2.1.2角度控制模式
TCC系统的角度控制模式因换流阀处于整流或逆变运行工况而有所不同。当换流阀处于整流器运行状态时,TCC的角度控制模式将采用定a角控制;而当换流阀处于逆变器运行状态时,采用定Y角控制。a角与Y角的控制逻辑基本相同。
TCC系统的a角或Y角控制功能的目的是将触发角a或熄弧角Y控制在参考值范围内。图3中,a角/Y角参考限值ALPHAREFLIM/GAMMAREFLIM在VARC中进行计算并分配至TCC的角度控制模块(Angle Control)中。当a角/Y角参考值与测量值的差值超过或低于迟滞值时,换流变分接头将进行相应调整。为避免换流变分接头的摆动,迟滞值设定为2. 5°,a角或7角控制仅在a角参考值(一般为15°)±2. 5“或Y角参考值(一般为17°)±2. 5°的范围内。