・上一文章:奔驰E300轿车手机不能无线充电
・下一文章:320MW发电机组电除尘器绝缘处理探索
3.2下发数据
下发数据采用标准Modbus协议格式,通过16功能码一次写人多个寄存器,其中4个寄存器用来表示ID,并用以区分具体的写变量。当控制器收到网关下发的数据后,先判断ID号是否需要,确定属于下发变量范围的ID后,对接收到的数据进行解析并赋值给对应的变量,以方便应用功能程序使用。HMI下发数据流程如图4所示。

4 HMI界面功能实现
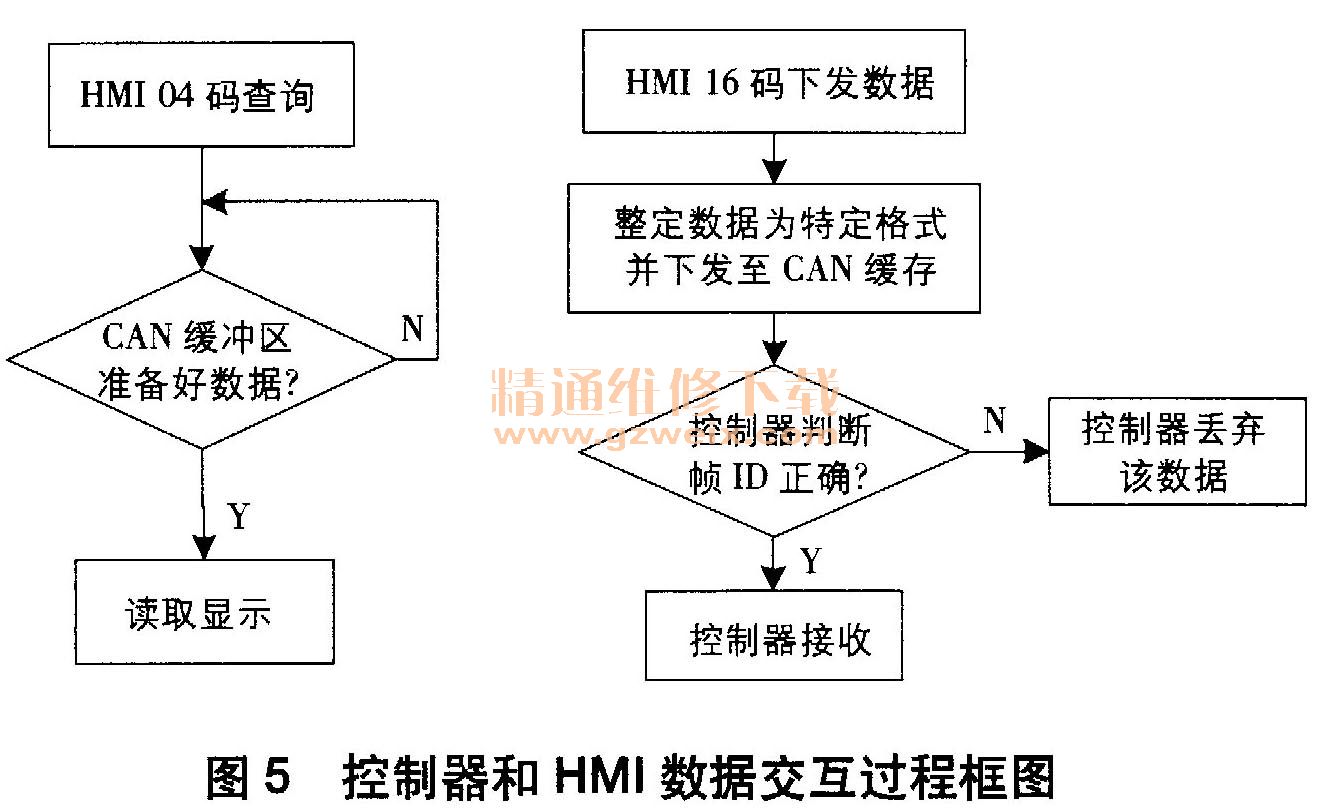
触摸屏采用昆仑通态嵌人式版,Modbus协议可在软件环境的设备窗口中添加设备管理元件为通用TCP/IP父设备,并选择莫迪康Modbus TCP作为通信子设备。控制器和HMI数据交互过程如图5所示。
控制器上传数据的获取通过在用户策略里编写循环代码脚本来实现,设备命令为:!SetDevice(设备。,6、nReadP(3、1、WUB、8,读1控制,读2事务序号,读3帧头,读4canID,读5canH1,读6canH2,读7canL1,读8canL2,nReturn) ”)。该命令表示读取3区寄存器从地址1开始的8个16位无符号数值,分别放人MCGS变量读1控制、读2事务序号、读3帧头、读4 canID、读5canH1、读6canH2、读7 canL1、读8 canL2中,执行结果存人变量nReturn中。
HMI下发数据通过在按钮控件中调用如下设备命令实现:!SetDevice(设备0,6、" WriteP (4 、1、WUB、8,写1控制,写2事务序号,写3常。,写4canID,写5canH1,写6canH2,写7 canH1,写9Data01、nReturn) ")。该命令表示将MCGS变量写1控制、写2事务序号、写3常0、写4canID、写5canH1、写6canH2、写7canL1、写9Data01的值,以16位无符号形式写人4区寄存器从地址1起始的8个寄存器中,执行结果存入变量nReturn中。
5 结束语
本文为解决CAN总线和以太网的连接问题提供了一种思路,使用CAN转以太网网关能把CAN总线整合到现有以太网拓扑图中,使管理监控层与生产测控层之间能有效连接,方便了上下层的实时通信。





