・上一文章:业余无线电爱好者为自己搭建一间电台室
・下一文章:6GHz频率计的制作
本文介绍的BEAM机器人是以太阳能为动力的昆虫机器人,当这个机器人受到一定的光线照射后,以小型电机做的脚便会移动整个身体,光线越强移动越快,光线越弱移动越慢,甚至停止不动。在这里光线就是它的“食物”,机器人得到食物(光线)便可以行动,而这个动作并不是预先编制的,而是受外界光线千变万化的影响。
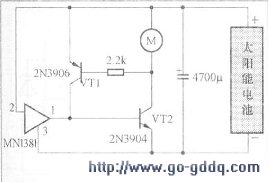
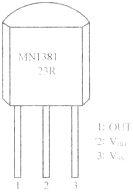
下图(左)是一个以MNl381元件为主的BEAM机器人,它由下图(中)的MNl381、小型太阳能电池板、三极管2N3906、2N3904和2.2k电阻、4700μF电解电容及小型直流电机组成。制作BEAM机器人的部件可以来自废旧的电器部件,小型直流电机可以使用随身听中的小电机,三极管也可以使用别的型号。MNl381是松下公司生产的电压管理元件,当电源电压大于1.8V,OUT引脚输出电压为1.5V,其引脚如下图(右)所示。
 |
 |
 |
BEAM机器人的组装比较随意,并没有什么约束,下图便是笔者组装后的成品。

上图(左)所示电路图原理如下:
当有光线照射到太阳能电池板时,电解电容器充电,两端电压逐渐上升。
当电容电压升至2.7V时,1381的1脚输出0.8V,这时2N3904导通,电机转动,2N3906的基极被拉低,2N3906导通。这时因为电机转动,电解电容的电压下降到不足2.7V。但因为2N3906这时已导通,所以2N3904的基极仍处于高电平,2N3904和2N3906继续导通,电机继续转动。当电压继续下降到O.7V,三极管关闭,电机也就停转,电容又开始充电,重复以上步骤。
从上面的原理分析可以看出,光线越强,电解电容的充电速度、电机转动速度越快,但这些过程是无意识的。如果你把这个做好的机器人丢在野外环境中,只要有光线和不被破坏得粉碎,它就会一直顽强地“爬行”下去,这就是BEAM机器人的乐趣所在。
在这个原理图中MNl381元件就相当于一个神经元,它的作用就是当外部条件达到一定的阀值时,产生反应,这种反应就相当于生物体内的神经反射。
当你看到这里,或许就有想制作的冲动,可能马上就去准备元件,但也许不久你就会失望地回来说:
“MNl381元件找不到。”的确这个元件不容易买到,笔者使用的也足友人赠送的。但是不要气馁,使用下图所示的原理图你一定可以轻易找齐元件。
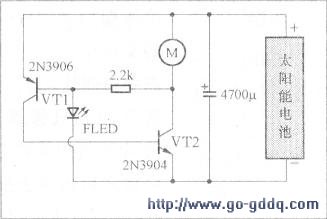
上图只是把MNl38l换成了闪光LED,这种LED现在在电子市场上很容易买到,一般有两色的或多色的。使用闪光LED的原理和MNl38l基本一样,这里不再分析,下图是做好的实物图片。

")
")



