・上一文章:维修由彩电矩阵电路引起的另类故障的心得体会
・下一文章:圆极化Ku头的制作
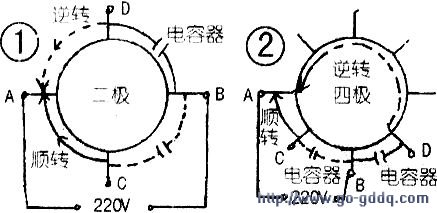
确定单相电动机的旋转方向,方法如下,以二极(或者四极)单相电动机为例,如图俯视电动机引出线端,现设上A、B为主绕组的出线端子。c、D为副绕组的出线端子 若A、c并接为公共线,D、B接电容器。
则电动机顺时针旋转。如图中实线箭头所示。如A、D并接为公共线,C、B接电容器。
则电动机逆时针旋转,如图中虚线箭头所示。此方法同样适用于单相六极、八极电动机而且不会有差错。
如果上面表述觉得生硬。
也可这样理解:单相电动机的土绕组和副绕组线圈在布局时就有互相为9O℃的电角度。加上接入市电时副绕组串接电容器的移相作用,结果使土绕组线圈产生作用于转子的磁场就比副绕组线圈产生作用于转子的磁场在相位上超前。此一前一后交替变化的磁场与鼠笼转子感应的磁场相互推斥下,单相电动机就按预定的方向旋转。
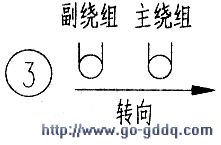
倘若把单相电动机转子旋转的轨迹变通为一根射线。以此射线为参照,箭头表示电动机的旋转方向,那么,起到主要电能转化为机械能作用的主绕组的位置就是在起到次要和协从电能转化为机械能作用的副绕组的位置前面我不清楚如此的表述是否合乎电工原理。




")
")