・上一文章:设计码头车鞍座升降定位逻辑电路
・下一文章:浅谈电动自行车电路检修常用工具、仪器及使用注意事项(二)
叉车等工程机械大部分电源总开关为单纯电控式或单纯手动机械式, 而在大型工程机械的应用上, 操作人员的控制位置一般远离地面, 这样单纯地应用哪一种电源开关都会存在不方便和不安全的因素。 为此, 在广泛了解应用背景的前提下, 借鉴现有技术, 经多次试验, 笔者成功研制出叉车及工程机械通用的远近程互控电源总开关。

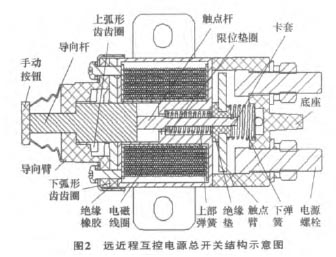
图1为远近程互控电源总开关实物, 图2为远近程互控电源总开关结构示意图。 本结构所解决的技术问题是提供一种既能远程控制又能近程控制的电源总开关,开关的导向杆在电磁力或手按的作用下, 在上下两交错布置弧型齿的齿圈中间沿弧面移动并转动,动一次就自动调整一次导向杆连同触点臂的高度,使触点臂接合两电极或断开两电极,实现一个开关可远近程两种控制方法, 可双向各自单独控制, 也可双向互相穿插控制, 无论人在远程还是近地都可以控制整机总电源。
2 设计方案
通过电磁线圈和手动按钮及回位弹簧来控制电源总开关的电源触点臂与两电极的接合导通或断开。 开关内部是将导向杆的导向臂置于上下2个弧形齿齿圈中间, 2个弧形齿齿圈的齿上下交错布置设计,上弧形齿齿圈的齿底高度不同(见图3), 高低间隔设计。
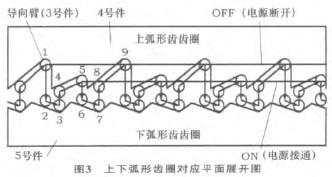
导向杆受下端弹簧的弹力总是压在上弧形齿的齿底处,当受电磁线圈磁力或手动按钮外力作用向下时,导向杆向下随同导向臂沿下齿圈弧面滑动转动。导向臂连着导向杆沿下齿圈的弧面自转,从上齿圈的高齿根转到低齿根,实现触点臂与两电极接合导通。
电磁线圈再得电或手动再按一次,导向杆向下随同导向臂沿下齿圈弧面滑动转动,在弹簧力的作用下向上沿上弧形齿面转动到上弧形齿高齿根,此时触点臂离开两电极, 实现断电。
电磁线圈得电的电磁力控制和手动按扭控制可以相互穿插控制, 只要触点杆动作一次, 无论是电磁力还是手动力, 都会使导向杆转动调整到下一个齿底高低位置, 进而使触点杆接通或断开两电极。这样远程就可以通过控制电磁线圈的得电来实现控制总电源, 离地的近程位置就可以直接用手动来控制总电源。
3 动作原理过程
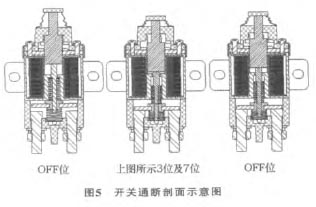
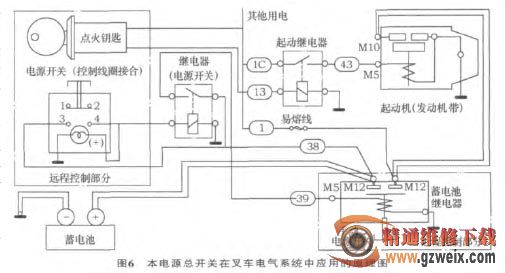
图4为上下弧形齿圈1~9位三维立体图, 图5为开关通断剖面示意图, 图6为本电源开关在叉车电气系统中应用的原理图。

圆周共有4个1~9位的动作过程, 1~9位的动作过程实现了电源的1 次接通和1 次断开 , 一周内实现了4 次接通和断开 。 动作可通过近端的手动控制和 远 端 的 电 器 按 钮 控 制(控制电磁线圈的得电断电)来完成。
1) 1位 上弧形齿齿圈高齿根处, 此位置时电源处于断开状态。 上弧形齿齿圈圆周内分布了4 个高齿根, 如图3中3号件导向臂所示高齿根位置, 即OFF 位 , 此 4 处 电 源 均 断开。
")
")
")
")

