・上一文章:详解设计智能前照灯的CAN刷新软件
・下一文章:分析东风雪铁龙C5轿车轮胎气压不足监测系统
3 系统工作原理及工作过程
3.1 座椅位置控制调节
按住某一个座椅开关, 座椅控制器接收到电阻信号, 通过A/D转换, 识别驾驶员的意图, 控制对应的电动机移动。 松开开关, 电动机停止移动, 并锁止。 控制系统原理图如图3所示。 图3中MCU表示单片机, M表示电动机, S表示传感器, A/D表示模数转换。 数字1到24表示座椅控制器的输入输出引脚。

3.2 座椅位置记忆功能

座椅记忆开关如图4所示。 驾驶员1按压记忆存储设定按钮, 然后按压座椅前后移动/坐垫上下移动/靠背倾斜的座椅开关, 发出要求对应的信号, 座椅控制器接收到开关发来的信号后, 控制对应电动机运转。 每个电动机上都有霍尔位置传感器, 记录当前电动机的位置。 驾驶员1把座椅调整到最适合该驾驶员的位置后, 按压M1开关, 座椅控制器记录下驾驶员1的座椅电动机位置传感器数据, 储存记忆在座椅控制器的EEPRAM中。 同样驾驶员2、 3调节好位置后,按压M2、 M3开关, 座椅控制器记录下驾驶员2、 3的座椅位置。 以后, 这3位驾驶员来开这辆车, 按压M1/M2/M3, 适合该驾驶员的对应位置信号就会被筛选出来, 座椅自动运行到适合该驾驶员的位置, 恢复到该驾驶员最近的一次设置输入的状态。但座椅记忆位置的恢复优先级别低于座椅的手动调节 ,即 DSM 优 先 处理驾驶员座椅调节开关盒送来的信号。
4 座椅电动机设计
该座椅电动机为永磁式双向直流电动机。 座椅控制器可以改变电动机内部的电流方向, 从而实现转动方向的改变, 通过机械结构的变换, 来实现座椅位置的改变。 电动机上带有霍尔位置传感器, 给座椅控制器发送座椅位置信号及位置变化的信号。
5 座椅控制器设计
5.1 座椅控制器DSM的内部组成
DSM内部由单片微型处理机MCU、 稳压处理电路、 开关信号A/D转换电路、 控制电动机的继电器、LIN通信模块等组成 。单片机采用飞思卡尔的MC9S08DZ128高性能8位单片机。 有关单片机、 LIN通信等详细内容可从飞思卡尔网站下载。
5.2 开关信号
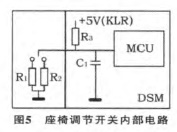
DSM能够接收开关信号, 识别驾驶员意图。 这些开关信号包括坐垫高度调节2路、 座椅前后调节2路、 坐垫倾斜调节2路、 靠背倾斜调节2路、 SET、M1、 M2、 M3共12路输入信号。 座椅调节开关内部电路如图5所示。 每路信号包括2个状态: 悬空 (高阻)、 R1接通/R2接通。 本质上讲, 这是一组电阻 信 号 。悬空定义为驾驶员要求座椅停止动作, R1接通或R2接通定义为驾驶员要求座椅向正方向或反方向运动。 通过DSM内外部电路, 将电阻信号转换成电压信号, 传递到单片机MCU的A/D 转换口 , 变成数字信号 ,对应当前的输入状态, 确定操作指令。 电容C1起开关去抖动的作用。
5.3 电动机控制
座椅控制器DSM通过内部继电器的吸合释放,能够控制电动机中电流的流向, 改变电动机的转动方向。 电动机转向控制电路见图6。
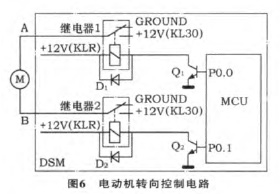
在系统不上电的状态, 继电器1和继电器2的触点为自由释放状态, 而且搭铁, 保护电动机; 在车辆处于起动状态, 起动机运转时, KLR不接通蓄电池电源, 继电器线圈不通电, 这个状态同系统不上电状态; 在点火状态, KLR接通蓄电池, 2个继电器受单片机MCU控制。 P0.1和P0.0电平为00时, 开关三极管Q1和Q2均不导通, 继电器不吸合, 电动机两端都搭铁, 电动机不运转。
")
")
")
")

