・上一文章:详解设计智能前照灯的CAN刷新软件
・下一文章:分析东风雪铁龙C5轿车轮胎气压不足监测系统
P0.1和P0.0电平为10时 , 开关三极管Q2导通、Q1截止, 继电器2吸合, 继电器1释放, 继电器2触点接12 V, B点电压为12 V, 继电器1搭铁, A点电压为0V, 电流由B流向A, 电动机M顺时针旋转。
类似的情况, P0.1和P0.0电平为01时, 开关三极管Q1导通、 Q2截止, 继电器1吸合, 继电器2释放, 继电器1触点接12V, A点电压为12 V, 继电器2搭铁, B点电压为0 V, 电流由A流向B, 电动机M逆时针旋转。 继电器触点接KL30电, 可以减轻点火开关的负荷, 对点火开关起一定的保护作用。 继电器线圈接KLR电能够保证在不使用车辆时, 该部分电路不消耗能源, 对降低整车静态电流有贡献; 还能在起动机运转 (此时KLR电源线上电压为0 V)时, 座椅不动作以保证安全。 当然在软件上, 也有控制策略来保证在起动机运转时座椅不动作, 这样起到双重保护的作用。
5.4 座椅调节控制的条件
座椅属于舒适系统, 为了保证车辆的基本性能和安全, 座椅控制器设定了本系统工作的条件为以下几点。
1) 工作电压大于12 V且小于16 V时, DSM模块正常工作。 工作电压小于12V, 禁止座椅电动机工作; 工作电压小于9V或大于16V时, 禁止座椅控制器DSM工作。 这就是DSM的高低电压保护。
2) 车辆速度低于7 km/h。
3) 车辆不处于起动过程中, 即点火开关不在起动档。 座椅控制器DSM通过LIN网络, 从整车得到蓄电池电压和车辆车速等信号, 通过座椅控制器内部分析计算来识别是否满足这些条件。
4) 电动座椅前后方向的调节量为100~160 mm,上下方向为30~50mm, 全程移动所需时间约为8~12s。当座椅电动机移动到极限位置, 电动机依然处于运行状态, 在0.1s内, 霍尔位置传感器的信息没有变化, 座椅控制器将停止向电动机供电0.5 s, 进入停转状态以保护电动机。 停转状态结束后, 0.1s内霍尔位置传感器的信息依然没有变化, 则表明电动机已经运转到极限位置, 座椅控制器将会停止向电动机供应电流, 使电动机不转。
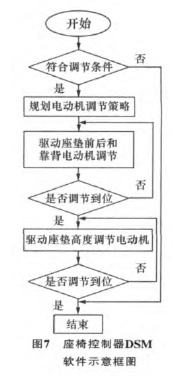
5.5 座椅控制器DSM软件设计
DSM软件主要为MCU初始化、 规划电动机调节策略、 检测是否符合调节的条件、 检测开关信号、驱动电动机运转 、检测是否调节到位等。座椅控制器DSM软件示意框图见图7。
6 结束语
当前带有记忆存储功能的座椅控制器在国内车型上应用的还较少。上海汽车集团在市场上销售的MG7与荣威750两个系列的车型已经采用本文所描述的驾驶员座椅智能控制系统。 相信随着汽车电子的快速发展, 驾驶员座椅智能控制系统将会被广泛地应用。
")
")
")
")

