・上一文章:使用康明斯B系列柴油机喷油泵的五个禁忌
・下一文章:剖析驱动轿车市场的未来汽车动力系统新技术(下)
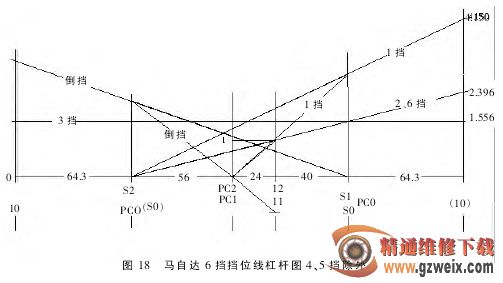
四、Mazda6 6 挡各挡位线
辅助减速排齿数 54/30,主拉维奈齿数 I56、S124、S221,其杠杆图是在拉维奈杠杆线的基础上两端再增加两组辅助杠杆(实际是一组左右分别布置)。
拉维奈前后排杠杆比例关系及延伸长度为:56×24/21-24=64-24=40
辅助排杠杆比例关系及延伸长度为:120×30/54=66.667
基准横座标位:I02(66.667)S1、S01 和 PC02(56)PC1、PC2(24/21)I1、I2 (40/56)S2。S02 和 PC01 (66.667)I01,(见图 18)。
1 挡:辅助太阳轮制动、齿圈主动,辅助行星架输出,带动拉维奈的后太阳轮 S2 主动,PC2 制动,I 输出。
作图也分为两步。第 1 步 I2 的输出 1 点与 PC2 0 点连接,并延伸至S2 点。第 2 步该 S2 点再与前 S0 的 0点连接,再延伸至 I01 点。
第 1 步(24+40):X=24:1
X=64/24=2.667
第 2 步(56+24+40+66.67):X =(56+24+40):2.667
186.67:X=120:2.667
X=186.67×2.667/120=4.148
2 挡:辅助太阳轮制动、齿圈主动,辅助行星架输出,带动拉维奈的后太阳轮 S2 主动,S1 制动,I 输出。I1、I2 输出 1 点与 S1 0 点连接,再延伸至 I01 点。
(56+24+40+66.67):X = (56+24):1X=186.67/80=2.337
3 挡:辅助太阳轮制动、齿圈主动,辅助行星架输出,带动拉维奈的前后太阳轮 S1 和 S2 主动,I 输出直接挡。辅助行星架 PC01 输出 1 点与辅助太阳轮 S01 的 0 点连接,再延伸至 I01 点。同样再作出 I02 点。而PC01 与 PC02 的连接线是根平行线,也就是 3 挡线。I01 或 I02 则为:
(56+24+40+66.67):X =(56+24+40):1 X =186.67/120=1.556
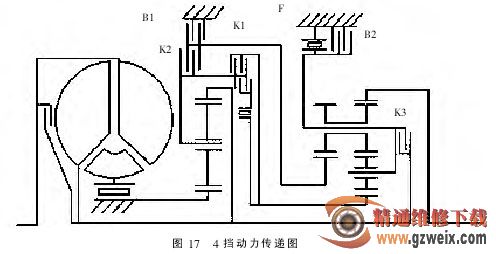
4 挡:辅助太阳轮制动、齿圈主动,辅助行星架输出,带动拉维奈的后太阳轮 S2 减速主动,PC2 也为常速主动,I 输出次减速挡(见图 17)。第 1 步辅助排 I01 的 1 点与 S01的点连接,得 PC01 点即 S1 点:(见图 19)

(56+24+40+66.67):1=(56+24+40):X X=120/186.67=0.643
第 2 步过 PC2 常规输入的 1 点与 S1 点的 0.643 点连接,求输出点I1:
40:X=(40+24):(1-0.643)
X =0.357×40/64=0.223
I1 点 =0.223 +0.643 =0.866 其速比为 1/0.866=1.155
5 挡:辅助太阳轮制动、齿圈主动,辅助行星架输出,带动拉维奈的前太阳轮 S1 减速主动,PC2 也为常速主动,I 输出次超速挡。
第 1 步辅助排 I02 的 1 点与 S02的点连接,得 PC02 点即 S1 点:
(56+24+40+66.67):1=(56+24+40):X X=120/186.67=0.643
第 2 步过 PC2 常规输入的 1 点与 S2 点的 0.643 点连接,求输出点I1:
(56+24):X=56:(1-0.643)X=0.357×80/56=0.510
I1 点 =0.510 +0.643 =1.153 其速比为 1/1.153=0.867
6 挡:辅助行星机构不参加工作,涡轮直接带动拉维奈的行星架PC1 主动,前太阳轮 S2 制动,I 输出超速挡。
前太阳轮和中行星架主动、前行星架和中太阳轮制动,I1、I2 输出 1点与 S1 的 0 点连接,(与 2 挡同线)
56:X=(56+24):1
X=56/80=0.700
倒挡:辅助太阳轮制动、齿圈主动,辅助行星架输出,带动拉维奈的前太阳轮 S2 主动,PC2 制动,I 输出。
第 1 步 I1、I2 输出-1 点与 PC1、PC2 的 0 点连接,得 S2 点,
56:X=24:-1
X=-56/24=-2.333
第 2 步 S2 及 PC02 的 2.333 点与 S02 的点连接,并延伸至 I02 点得:
54:2.333=(54+30):X
2.333×84/54=3.629
五、62TE 各挡位杠杆图
假定三排行星齿轮均为 84/42、84/42、84/42。
")
")
")
")

