・上一文章:分析及诊断东风日产轿车 SRS 系统故障
・下一文章:现代御翔顶灯和仪表背景灯闪烁
2)软件系统设计
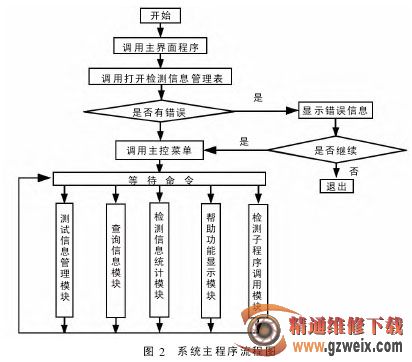
虚拟仪器是一种将计算机技术与仪器技术有机结合,由计算机控制的模块化仪器系统,即将先进的信号处理算法、数据库技术和办公自动化技术应用于虚拟仪器的设计与集成,系统主程序流程如图2所示。系统开发平台选用简单易学、高效的可视化Visual Basic软件。
VB软件采用的是基于文本语言的程序代码编程语言,对于灵活驱动通用虚拟仪表控件、调用试验报告(Word文档)、数据报表(Excel文档) 以及用于通道指定标定等的Access 数据库、模块化检测开发等方面具有更为灵活的优势以及更快的开发进度。
VB 软件不但提供良好的界面设计能力,而且具有强大的串行通信功能,适用于对系统稳态数据的采集,但在对多路数据的高速动态采集时存在一定的不足,尤其是当上位机与下位机进行频繁的数据通信时,上位机往往会因忙于数据的收发而不能实时地响应用户的操作,使得系统反应迟缓,影响系统的正常工作。针对这一问题,本设计采用中断调用技术实现多路 A/D 高速实时数据的采集。
该系统的软件采用分层模块化设计方法,整个测试软件分为上、下2 层,上层为主控模块,下层为各测试项目的检测功能模块。主控模块与各测试项目的功能模块均为可独立运行的系统,2 层之间通过公共系统数据库进行数据交换。
2.检测参数及数据处理
检测过程中以时间步长采样,获得的测量参数是离散的数据点。为了获得车辆制动性能的多个评价参数,并反映车辆在制动过程中的动态状况,对离散信号进行曲线拟合,并利用数值积分和数值微分算法获得位移和制动减速度的动态变化情况。
① 速:采用周期法进行车速脉冲的测量,根据车速传感器对应的计数器值计算出实际车速:
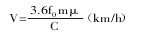
式中:V为实际车速;f0为基准参考时钟频率;m 为车速传感器脉冲当量;μ 为传感器参数;C 为车速传感器对应的计数器值。
②位移和制动距离:利用复化New-Cotes公式求解采样点的车辆位移,位移的公式为:

式中:T 为制动时间;n 为 New-Cotes 公式的点数。
")
")
")
")

