・上一文章:捷豹路虎车系应急救援指南(一)
・下一文章:剖析现代新雅尊新技术(下)

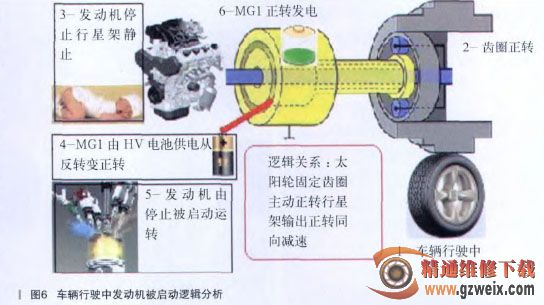
车辆起步通常在加速踏板开度不大时发动机是不工作的,MG2驱动车辆,MG1以反方向旋转而不发电,如图5所示。只有MG2工作时如果加速踏板开度加大需增加驱动扭矩,MG1将被启动。同样,如果电源控制模块监视的项目与规定值有偏差,MG1也将启动发动机。车辆起步后,发动机在停止运转的时候MG 1是反向空转的,这时电源控制模块启动,MG1只需以较低的转速正转,发动机就会被启动。如图6所示。MG1由反向空转变为正转的过程中需要有个停顿后才能变为正转,当HV蓄电池给MG1开始供电的时刻,MG1的驱动电流首先使MG1停止,根据逻辑关系此时发动机就开始正转了,车速的高低就决定了MG1正转的转速高低,发动机有200r/min以上的转速就可以启动,当然发动机一般都不会在车速很高的时候启动。车辆行驶中和停车时发动机被启动的逻辑关系是相反的,行驶中的逻辑关系中太阳轮只是相对来说是固定,实际是没有固定元件。电源控制模块接收到发动机已经运转的信号后会马上停止MG1的启动电流,已经启动的发动机将带动MG1正向转动而转换成发电机为HV蓄电池充电,MG1发电的逻辑关系如图4所示,同样是没有固定元件,相对于停车时齿圈如果正转那么太阳轮的正转速度会降低。如果车辆起步前发动机是在运转的,复合齿轮由静止而被MG2驱动正向转动而完成车辆起步,此时的MG1转速会降低。
发动机微加速状态时,发动机的一部分动力直接输出,剩余动力用于MG1发电。通过变频器的电力传输.电力输送到MG2用于作为MG2的输出动力,这个时候主要是MG1提供电力,HV蓄电池不提供电力,如图7所示。MG 1发电的同时是被发动机驱动并且是有一定的来自MG2的载荷阻力,MG1正转的转速就有下降的趋势,这时可以看做是齿圈固定(实际旋转),行星架主动,太阳轮输出增速状态来发电。但是反过来看太阳轮也是有阻力的(图7中的逻斩关系),行星架的转速高于MG1的转速相当于行星架做主动.MG1太阳轮固定(实际是旋转的),复合齿轮输出驱动车轮,也就是发动机在驱动车轮的同时MG 1也在发电。这里的复杂点是发动机驱动车轮是有一定的传动比,传动比是线性调节的,MG1太阳轮的正转速度是线性调节传动比的决定性因素,MG1线性调节传动比是受混合动力控制模块控制,至于是控制MG 1作为电机来控制驱动电流或者是控制MG7作为发电机来控制发电机制动效应,关于这两点就不好确定。总的来讲对于理解混合动力系统的基本运作只要知道MG1可以线性调节传动比就可以了。

低载荷巡航状态和发动机微加速状态动力传递基本相同,只是MG1和MG2的转速有点差别,在发动机微加速时MG1的转速高于MG2,而在低载荷巡航时是相反的。这时MG2的转速高于发动机的转速,MG1转速有所降低.发动机可以工作在较低的经济转速,提高了车辆的经济性。

")
")
")
")

