・上一文章:宝马5系轮胎压力监控系统初始化方法
・下一文章:剖析长城GW4D20型柴油机电控系统(一)
5夜视辅助系统的电气转换过程
夜视辅助系统的电气转换如图13所示。夜视辅助系统控制单元是由15号线和31号线供电。J853通过2条专用总线与J764进行通讯,通讯内容包括诊断信息、数据和命令等。J764的原始图像通过2条图像传输导线传给J853,2条专用总线与2条图像传输导线都采用屏蔽隔离处理了。此外,还有2根从J853到J764的供电线。是J853给J764提供蓄电池电压的。一条双绞线(没有外包皮,也没有屏蔽处理过)从夜视辅助系统控制单元J853到组合仪表内控制单元J285,模拟的图像信号就通过这条导线被送往组合仪表的显示屏。从J853有2条扩展CAN总线通向数据总线诊断接口(J533),用于与其他控制单元进行数据交换。

6夜视辅助系统的通讯结构
要想在车上实现夜视辅助系统的全部功能,J853需要用到很多数值和信息,这些数值和信息很多来自于其他控制单元。这些控制单元通过LIN总线,CAN总线,F1exRay总线和MOST总线来彼此进行通讯,夜视辅助系统的通讯结构如图14所示。
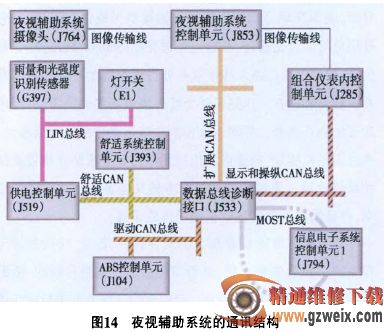
J853接收含有各种量值和内容的CAN总线信息,将经过处理的热敏图像和用语显示的信息传给组合仪表。
数据总线诊断接口(J533)是各种CAN总线系统和FlexRay总线的接口.是元件保护的主控制单元。
组合仪表内控制单元(J285)将夜视辅助系统摄像头的图像显示在显示屏上.在等告时发出声响信号,将与夜视辅助系统相关的信息显示在显示屏上,在出故障时给出故障信息,将处理过的车外温度传给夜视辅助系统。
用户通过MMI的信息电子系统控制单元1(J794)可以对夜视辅助系统进行各种设置。
舒适系统控制单元(J393)发送15号线信息位,用于可靠性校验。
供电控制单元(J519)是雨量和光强度识别传感器(G397)和车灯开关E1的LIN总线主控制单元。G397用于发送最新测得的亮度;灯开关(E1)发送夜视辅助系统按钮的操纵信息及发送灯开关当前位置信息。
ABS控制单元(J104)发送当前车速信息、发送车辆当前的偏摆率。
7夜视辅助系统的诊断和系统校准
(1)夜视辅助系统在用故障诊断仪诊断时的地址码是84。从数据块中可以读出以下信息:控制单元供电;控制单元当前温度;存储的控制单元最高温度和最低温度(有时间标志);个性化数值;夜视辅助系统摄像头当前的电流消耗;快门当前状态等。
可通过执行元件诊断来检测下述部件:夜视辅助系统摄像头加热器、机械式摄像头盖(快门)、临时激活元件保护。另外,还可以通过执行元件诊断来启动软件例行程序,用来确定摄像头有多少像素损坏了.这个检测要持续大约2 min-3 min,继续进行执行元件检测,就可以把一个检测图像显示在组合仪表显示屏上。
(2)在更换了夜视辅助系统摄像头、摄像头支架或拆卸过前保险杠,如果夜视辅助系统控制单元内有”没有进行基本设定或基本设定错误”的故障记录,对车辆后桥进行过调整时,需要重新校准系统;但在更换了夜视辅助系统控制单元或刷新了夜视辅助系统控制单元时,不需要进行校准。
校准系统需要以下工具和设备:故障诊断仪(如VAS5051 B)、车轮定位仪(如VAS 6141)、校正装置基本组件VAS6340/1或校正仪VAS 6430,夜视辅助系统校准板VAS 6430/6,线激光VAS 6350/3。校准夜视辅助系统摄像头,必须按照下述步骤进行。
1)将VAS 6430/6装到VAS 6430/1的校准横梁上。
2)将VAS 6430/1安放到距离摄像头前120 cm的地方。
3)在车轮定位仪中启动夜视辅助系统校准程序。
4) VAS 6430/6的高度调节。转动背面的手柄,就可以将高度调节到合适的位置。
5)将夜视辅助系统校准板的水平仪1调至平衡位置(以便对比地面情况)。
6)通过侧面移动,将校正装置挪到合适的横向位置(到达相应位置时,车轮定位仪上会显示出来)。
7)通过2个调节螺栓,将水平仪1和水平仪2调至平衡位置。
8)借助于线激光再次检查高度调节情况,必要时进行调整。
9)激活VAS6430/6的加热功能。
10)在故障诊断仪中选择并启动”J853-校准”程序。这个程序分为2步:首先对夜视辅助系统摄像头的滚动角进行机械调节.转动内六角调节螺栓,在水平方向上校正摄像头,旋转方向由故障导航程序给出,当滚动角达到规定值时,这个程序会显示出来;然后是计算偏摆角和俯仰角,并存入夜视辅助系统摄像头。
对夜视辅助系统摄像头的校准过程会产生如下结果:对夜视辅助系统摄像头的滚动角进行准确的机械调节,对夜视辅助系统摄像头的偏转角进行静态调节(该角度由控制单元以电子方式进行修正},对夜视辅助系统摄像头的俯仰角进行静态调节(该角度也是由控制单元以电子方式进行修正的)。
奥迪车夜视辅助系统还可以进行动态校准。只要夜视辅助系统识别出地平线,动态校准就会进行。最好是在公路或高速公路上行车来识别地平线。动态校准会确定夜视辅助系统摄像头的偏转角和俯仰角与静态校准值的偏差,这2个偏差会参与夜视辅助系统摄像头图像的电子校正。如果动态校正所确定出的角度偏差值超过了某个极限值.那么夜视辅助系统控制单元内会记录下”没有进行基本设定或基本设定错误”故障信息,必须重新进行静态校准,这是因为夜视辅助系统摄像头在经历驻车冲击后位置发生了变化,夜视辅助系统摄像头的俯仰角可以以机械方式来改变(这不属于动态校准的内容)。
")
")
")
")

