・上一文章:全新桑塔纳正式发布
・下一文章:剖析奔驰自适应制动系统新功能
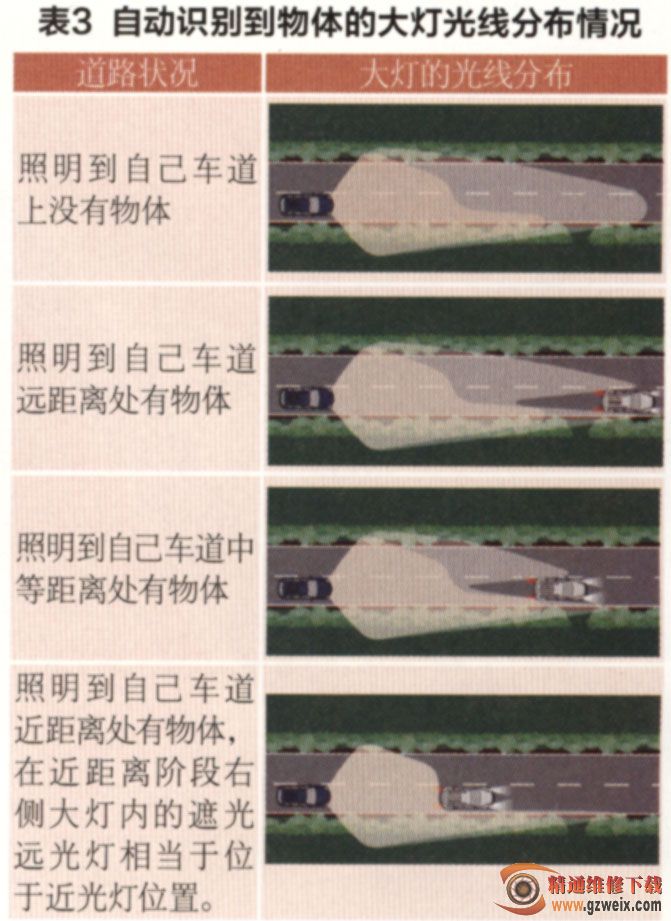
(2)自动识别到前面行驶的物体(照明开启/可识别)改变大灯的光线分布,如表3所示。
2.工作过程
动态车灯辅助系统的运行依靠多功能前置摄像头(带有摄像头控制单元J852)、图像编辑软件以及氖气大灯之间智能化的相互配合。
通过前置摄像头可以识别前方行驶的已开启照明的车辆(摄像头工作范围为400m)或迎面驶来的已开启照明的车辆(摄像头工作范围800m)。这些信息将被进行数字化评估,以及确定识别到的车辆的准确位置和宽度。此外,系统还可以区分道路照明、红绿灯或来自路桩的放射光,这些信息将被发送到弯道灯控制单元和大灯照明距离调节装置,并结合其他的车辆信息,如速度、方向盘转向角或整体照明情况自动计算最佳的光线分配,并发送至大灯控制单元,这些装置都直接安装在大灯上。
它们结构相同,并且具有相同的共享单元。这些控制单元根据插头编码进行识别,不论其控制的是左侧还是右侧大灯。根据计算光线的分布,氙气大灯内的一个特殊柱状挡板在光源和物体透镜之间移动,这样将不会对其他识别到的道路使用者造成炫目,也就是说它们被排除在光线分布之外。
3. 氙气大灯
途锐20训中的氙气大灯首先采用遮光持续远光灯作为标配,氙气大灯的位置及内部结构如图14所示。

动态车灯辅助系统的功能是通过附加的可转动柱形挡板(遮板)实现的,挡板位于带有氙气燃烧器的反光罩和透镜之间,通过左右大灯的智能控制装置,此附加挡板可以减弱(遮蔽)可能会造成炫目的光线。即使在关闭DLA情况下,此挡板也可以接通远光灯和近光灯。此外,它还可以在近光灯位置提供城市灯光、普通公路灯光和高速公路灯光。
")
")
")
")

