・上一文章:大众帕萨特加油无力、放炮
・下一文章:宝马X5轮胎压力监控系统无法复位
摘要:采用自定义两线同步通信来进行辅助泊车和DVD之间的通信,给出硬件电路设计说明,并详细描述了软件通信协议,软件流程设计及代码设计方法,实测结果证明该通信稳定可靠。
1概述
随着国内汽车保有量的增加,道路两侧的泊车位日趋紧张,对于泊车位的空间利用就显得很有必要。辅助泊车和自动泊车技术应运而生,辅助泊车利用侧雷达进行位置检测,并运用相关算法对泊车进行推算得出泊车关键区域,通过获取当前车的状态(如转向盘转向角度、档位、制动及车速状态)给驾驶员做转向换档等操作,在车靠近前后车时会给出雷达报警及相应的人机界面提示。
一般的辅助泊车系统都具备显示屏,给出图形图像或者文字提示,某些泊车系统会给出声音提示。不少辅助泊车系统采用集成式设计,即泊车控制器和显示器集成一体,利用LED灯设计外观和显示LCD屏图像、图案。在汽车电子设备日益增多的今天,适当地利用现有人机界面是一种很有利的做法,可以减少相关硬件成本和软件成本投入,可以利用现成的显示屏如DVD显示屏和音响作为声音提示。
在辅助泊车系统中,不仅需要把前后雷达测距发送给DVD显示,也需要及时把给驾驶员的提示信息如声音文字、图像传递给DVD,, DVD通信协议及人机界面设计显得十分重要。只有与DVD通信畅通无阻,才能保证泊车过程中驾驶员始终得到辅助泊车控制器的指导,使得泊车更加安全可靠,驾驶员更加省心省力。
2辅助泊车系统与DVD通信的硬件设计
2.1辅助泊车系统结构
辅助泊车系统结构框图见图1,雷达控制模块硬件框图见图2。
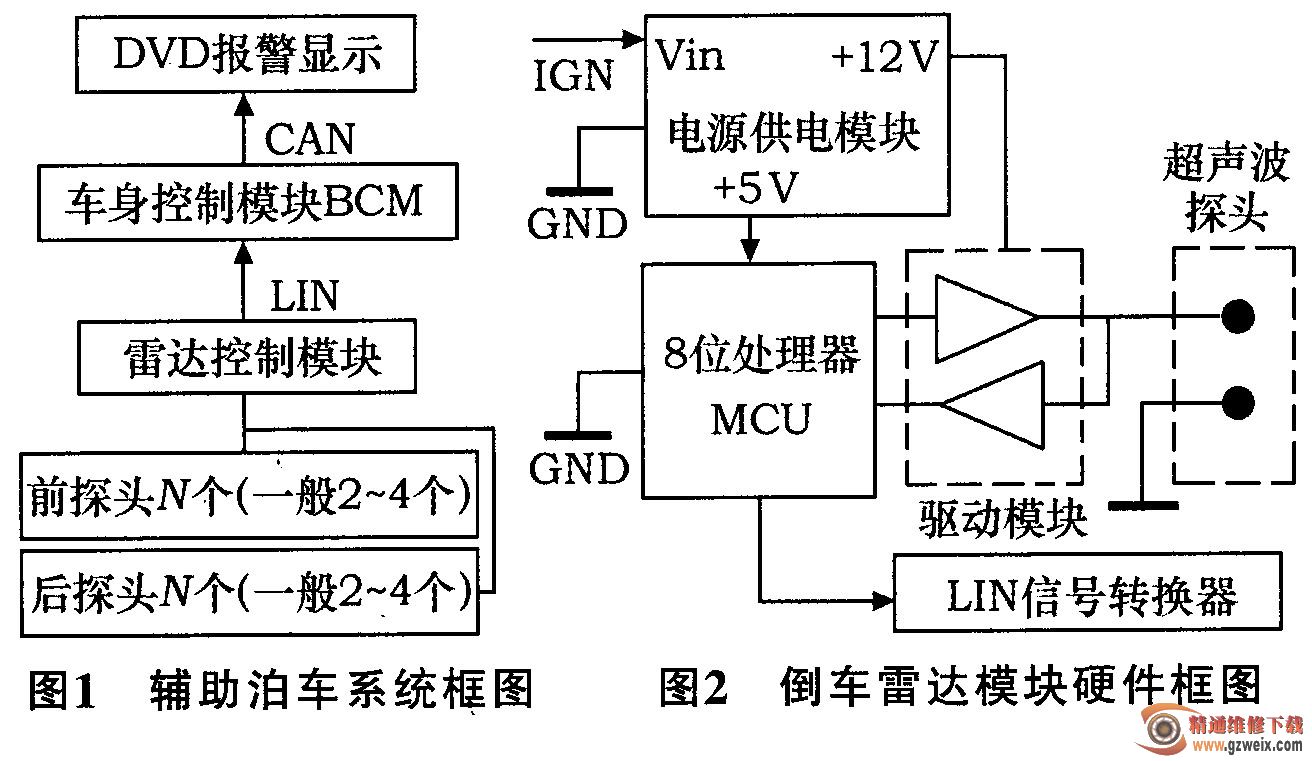
如图2所示,倒车雷达硬件由以下几个部分组成:8位处理器,电源供电模块,超声波发射驱动模块,超声波探头,信号接收、滤波处理模块,LIN信号转换器。
2.2辅助泊车系统工作过程
系统发射超声波之前,先对探头进行充电,使探头内部电路获得能量。充电结束后,发射20个58 kHz的超声波,占空比50%;如果探测到障碍物,控制器将很快接收到回波信号。控制模块通过LIN总线将障碍物的距离和方位信息传递给BCM模块,BCM再通过CAN总线将数据传输到DVD显示。
正常报警和探头自检功能定义:系统上电后,模块首先对探头进行自检,系统自检时间约2s,若系统自检正常,则进入正常测距模式显示;若系统一个或多个通道未连接或者发生故障,系统发送故障数据,DVD显示界面可以按照设定的程序进行显示,不进入正常测距模式。
")
")
")
")

