・上一文章:帕萨特1.8T轿车有时冷车启动困难
・下一文章:东南V3菱悦加速无力
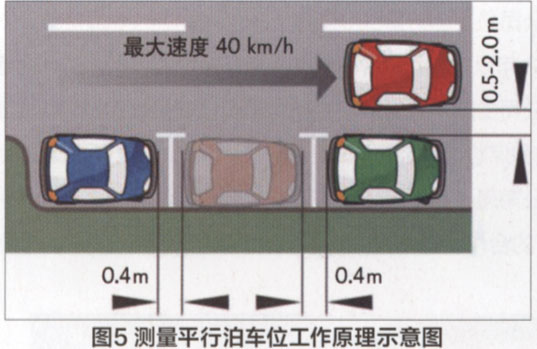
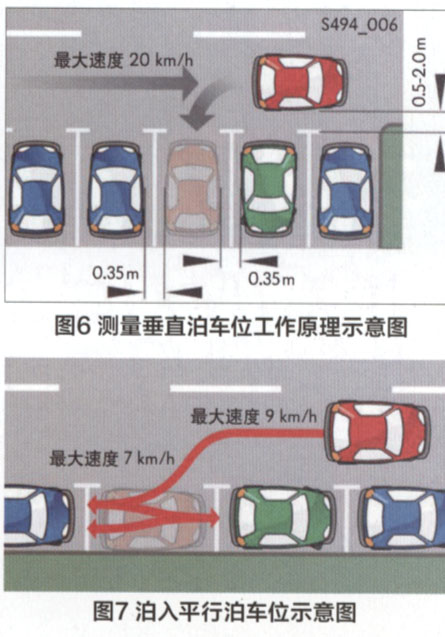
测量垂直泊车位时,符合要求的垂直泊车位长度应大于车身长度加上机动距离与安全距离(左右至少各留有0.35m)。驶过泊车位时的车速要低于20km/h。车辆所在的最佳位置应在垂直泊车位旁,处于行驶方向上,且车辆侧面与已停放好的车辆之间的距离在0.5m到2.0m之间。一旦泊车位被确定,PLA系统就会通过组合仪表显示屏上的阴影部分要求驾驶员继续前行,驶过泊车位,直至到达一个适合泊车起始位置。其工作原理如图6所示。
当车速在40-50km/h之间(针对平行泊车位)或20-50km/h之间(针对垂直泊车位)时,PLA系统便会切换至被动模式(待机模式),驾驶员可以在组合仪表显示屏上看到相应的指示。当车速再次低于40km/h或20km/h时,无需重新启动系统,传感器就会开启并开始探测泊车位。在车辆速度超过50km/h时,测量泊车位的传感器会完全关闭,并且之前保存的数据会被删除,PLA系统必须重新启动。当车辆停止行驶超过30s时,传感器也会暂时关闭。一旦车辆再次启动,传感器就会重新启动。
(2)启动PLA系统
每次进行泊车过程前都需要通过按键E581来启动PLA系统,PLA系统指示灯K241亮起表示系统已开启。组合仪表显示器上可能会显示已存在存储器里的泊车位,也可能还未确认和保存任何泊车位,那么就会要求驾驶员继续行驶。根据按键次数的不同,可以在要进行泊车时选择以下不同的功能:第1次按键表示开启PLA系统,并自动在显示屏上显示车辆右侧的平行泊车位;第2次按键表示自动在显示屏上显示车辆右侧的垂直泊车位;第3次按键表示关闭PLA系统。
如果驾驶员想在道路左侧泊车,只需在按下PLA系统按键后打开左转向灯进行切换即可。原则上PLA系统默认左置方向盘车辆应在道路右侧停泊(右置方向盘车辆默认应在道路的左侧停泊),在这种情况下驾驶员不需要给予车辆其他指令。
(3)通过PLA系统进行泊车
在测量到合适的泊车位且确定车辆位 置恰当后便可以进行泊车了。在驾驶员开始 进行自动泊车前,必须先挂入倒车挡,并在静止约0.5s后开动车辆。静止时间是指从挂入倒车挡后到车辆真正开动的时间,在这段时间里,所有相关系统都会启动,并开始计算行驶路线。在自动泊车过程中无需驾驶员操控方向盘,由PLA系统来控制方向,并按照计算好的行驶路线驶入泊车位。
在多次移车入位的过程中,驾驶员可以在组合仪表显示屏上看到前行或后退的操作提示。位于后部的2个轮速传感器G44和 G46可以识别车辆是在前行还是后退。此外,在倒车过程中还将额外用到8个泊车辅助系统传感器和4个侧面PLA系统传感器来监控距离。当泊车过程结束后,组合仪表显 示屏会提示自动转向辅助已完成。如果在自 动泊车过程中识别到车辆所处的位置有危险情况或驾驶员介入了方向盘控制,自动泊 车系统就会中止。
①泊入平行泊车位
驾驶员按下PLA系统键选择平行泊车功能,其相应的图示会显示在组合仪表显示屏上。平行泊车可以通过多次移位完成。泊车时,从泊车起始位置到进入泊车位前的最高车速不得超过9km/h(直线行驶),在驶入泊车位的过程中,最高车速不得超过7km/h(在方向盘转动后)。泊入平行泊车位过程如图7所示。
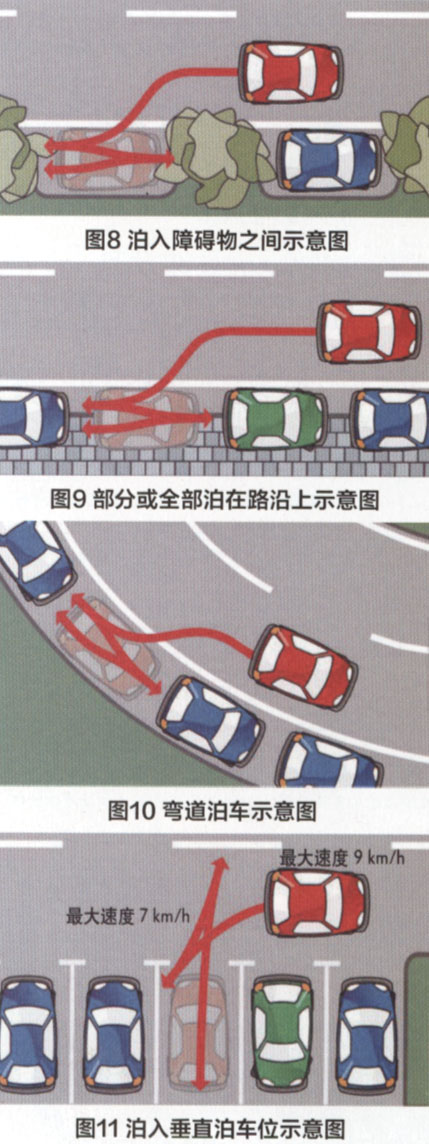
PLA系统2.0可以将车辆泊入障碍物之间(见图8),该系统不仅能识别车辆,还可以 识别其他物体,可以对如房屋墙面、围墙或路沿等进行定位。另外,系统还可以帮助驾 驶员在如树木、垃圾桶、灌木丛或摩托车等 障碍物之间泊车。如果识别到路沿,则会在 距离路沿边缘15cm处以“通过路沿定位”的方式进行泊车;如果识别不到路沿,则会将车辆与停泊在障碍物前的其他车辆停成一排。
")
")
")
")

