・上一文章:帕萨特1.8T轿车有时冷车启动困难
・下一文章:东南V3菱悦加速无力
系统还可以辅助车辆在弯道上进行泊车(见图10)。在其他条件不变的情况下,系统可在半径超过20m的曲折道路上或弯道上识别出泊车位,过程与在直路上没有区别。
②泊入垂直泊车位
驾驶员通过PLA系统按键选择垂直泊车功能(见图11),相应的图示会在组合仪表显示屏上显示出来。垂直泊车过程可以通过多次移位来完成。为使两侧车门可以相同程度打开,系统会控制车辆停在车位的正中间。
位于车辆后侧的传感器G716和G717主要用来控制车辆,使其位于车位的中间,这两个传感器的探测范围与其他用来感应障碍物的PDC传感器功能一样。从泊车起始位置到进入泊车位前的最高车速不得超过9km/h(直线行驶),在驶入泊车位的过程中,最高车速不得超过7km/h(在方向盘转动后)。
(4)制动辅助
制动辅助有2个作用:在超过泊车限速时减速;在与障碍物有碰撞危险时制动车辆至静止以避免发生碰撞。
在泊车过程中会进行相应的减速(见图12),在超过限速范围,即行驶速度大于9km/h(直线行驶)或行驶速度大于7km/h(在驶入泊车位的过程中)时,PLA系统会要求ESP系统执行减速,泊车过程会继续,也就是说PLA系统始终保持开启状态。如果车辆继续加速至超过10km/h时,PLA系统将停止工作。

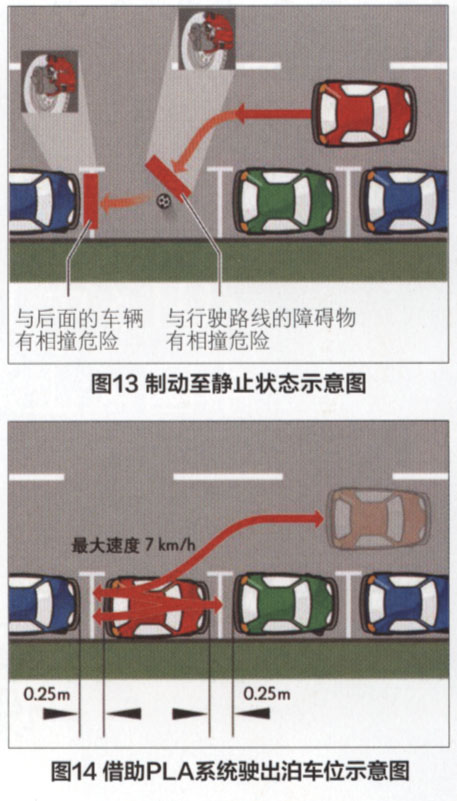
开始自动泊车后,在行驶路线上发现有障碍物且驾驶员未能及时发现进行制动,或PLA系统发现与障碍物有相撞危险时,系统会进行制动直至车辆停止(见图13)。该功能只有在车速不超出限速上下各1.5km/h的范围时才可使用。车辆被制动至静止状态后,自动泊车过程将终止,再次启动PLA系统后,必须重新识别泊车位。
以上PLA系统的制动功能仅用于减少碰撞危险或减少事故危害,不能作为安全系统来使用。在理想条件下可以避免事故,但是不确保一定能在障碍物前停下。驾驶员仍然要注意对油门、离合器和制动过程的控制。
2.驶出泊车位的工作原理
在PLA系统2.0的帮助下驶出平行泊车位的步骤如下:启动PLA系统;测量泊车位;在PLA系统帮助下驶出泊车位。
(1)启动PLA系统
在每次驶出泊车位前都需要通过按键E581来启动PLA系统。为了进入驶出泊车位模式,车辆在点火之后不得开动,即车辆的位置不得发生改变。根据按下PLA系统按键次数的不同,可以在驶出泊车位时选择以下不同功能:第1次按键表示启动PLA系统(用于驶出泊车位);第2次按键表示关闭PLA系统。
通过点亮PLA系统指示灯K241来表明功能已激活,在组合仪表显示屏上会提示 “请打开转向灯,挂入倒车挡”。
(2)测量泊车位
驶出泊车位的过程只需用到保险杠上的PDC传感器(前后各4个)。它们可以感应出待泊车辆与前后静止车辆或障碍物之间的距离。驶出泊车位需要的最小距离为车身长度加上前后分别至少0.25m的机动安全距离。
(3)借助PLA系统驶出泊车位
按下PLA系统按键,在系统测量完泊车位中车辆的位置后就可以开始驶出泊车位了(见图14).驾驶员在车辆处于静止的状态下打开转向灯,挂入倒车挡后起步,系统就开始辅助车辆自动驶出泊车位。转向灯的方向告知车辆将从哪个方向驶出泊车位。接下来驾驶员就可按照组合仪表显示屏的提示(与泊入时相同)进行操作。系统完成数次前后移位后,再由驾驶员接管方向盘。
如果PLA系统认为经过下一段规定的行驶路线后,车辆能够驶出车位,那么就会结束辅助过程,并由驾驶员接管方向盘。如果在自动驶出泊车位过程中识别到会危及车辆安全的物体,或驾驶员介入了转向操作,自动泊车辅助就会中断。由于技术原因PLA系统2.0还不能辅助车辆从垂直泊车位中驶出。
(4)制动辅助
ESP系统会介入车辆驶出泊车位的过程(与泊车入位时一样),当驶出泊车位的速度大于7km/h时实施减速制动。在探测到障碍物时,会制动车辆至静止,以减少损失。
六、系统限制
测量泊车位以及之后的泊车过程可能会因为环境因素而受到影响,如系统不能识别如下物体:曹井盖、凹陷或松散的路肩、泊车位上较小的物体。超声波传感器的物理特性可能会受一些因素的影响,如传感器脏污、传感器薄膜上有雨滴、传感器上有冰雪,以及大雨、大雪或大风天气。
如果路沿上有树叶、垃圾或积雪会加大PLA系统的辨识难度,因为树叶或积雪对超声波信号的反射有较强的影响,会导致PLA系统接收不到返回的超声波信号,造成系统运行错误。另一个关于系统限制的例子是在岔路口或建筑物入口处,系统可能会误将附近大门关闭的庭院入口视作理想的泊车位。当出现系统故障或物理故障时,组合仪表显示屏上会出现提示。
")
")
")
")

