・上一文章:凯迪拉克凯雷德(LY6/L76/L92型发动机)正时校对方法
・下一文章:奔驰S600右侧汽缸全不工作
巡航控制系统(Cruise ControlSystem)简称CCS,该系统对汽车速度和行驶状态进行调节和控制,以减轻驾驶员的疲劳强度,提高行车安全性以及舒适性。汽车巡航控制系统如图1所示,下文将介绍主动巡航控制系统。

一、系统简介
主动巡航控制系统(Adaptive CruiseControl,自适应巡航控制系统)简称ACC,是在定速巡航系统(DCC)的基础上开发的另一种巡航系统,它能够自动保持车辆的巡航速度、保持本车与前方车辆设定的安全距离。ACC系统提高了驾驶舒适性,减少了对油门踏板、制动踏板的操作,大大缓解了驾驶员长途驾驶的疲劳强度。
ACC系统模仿蝙蝠超声波定位飞翔的原理,使汽车按照驾驶员的意图保持与前车的距离。车辆前方装有一个毫米波雷达传感器,用来探测前方车辆与本车的距离,如果车距大于设定值,车辆会自动加速直至达到设定车速;如果小于设定值,车辆会自动减速。减速通过三种方式实现:①降低发动机扭矩(减小TPS开度);②换低速挡(配置AT变速器);③施加制动。
如果以上三种措施没有达到预定车速,系统将通过仪表警示灯及声音系统提示驾驶员介入实施制动,如果车距过小有碰撞的趋势,系统的警示频率将会加快,同时关闭车窗,收紧安全带,加大制动力矩。
1.系统功能
ACC系统有四大功能:①测量前方车辆车距;②测量前方车辆车速;③测量前车位置;④选择跟踪车辆。
2.工作条件
ACC不是全自动驾驶系统,主要适用于高速公路和城乡公路进行前进直线行驶,只有满足下列条件才能工作:①本车前方只有一辆车;②前车距离、速度、方位角被准确测量;③系统无故障,电控单元正确分析传感器数据;④车速在30~210km/h;⑤活动物体(ACC对固定目标无法做出反应);⑥晴朗天气(恶劣天气如雨、雪、泥水,由于雷达的探测视野受到影响,故影响ACC系统的稳定性)。
二、工作原理
图2为ACC系统的工作原理。驾驶员通过ACC控制开关设置巡航车速与前车安全距离,设置内容及工作情况通过仪表直观显示。
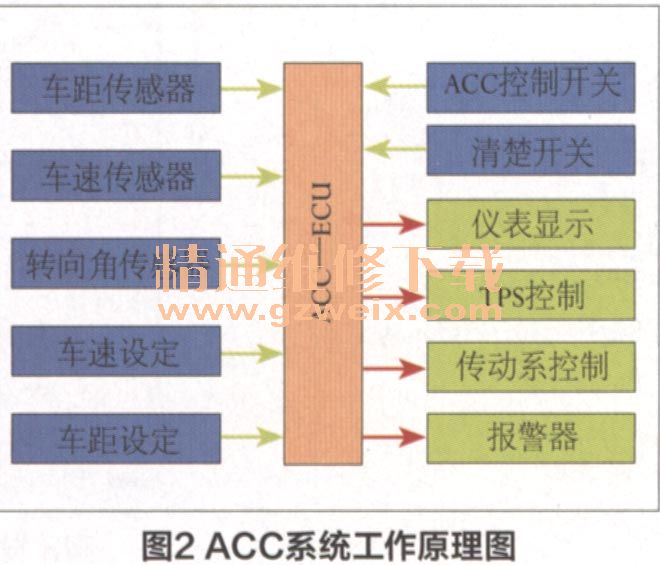
车距传感器、车速传感器、转向角度传感器监控汽车行驶状态并把信息输送到ACC, ECU,其具体工作过程如下:①当主车前方无行驶车辆时,主车处于普通的巡航状态,ACC系统按照设定的车速对主车进行匀速控制。②当主车前方有目标车辆时,前车车速小于主车,ACC系统通过电子制动助力器控制主车减速,确保两车的车距为设定距离,主车减速到理想车速时跟随前车行驶。③前车变道或主车驶向其他无车道路时,ACC系统向TPS发送指令使车辆加速到设定车速,车速恢复后,ACC系统又转为匀速控制。④当驾驶员参与驾驶时,ACC自动退出对车辆的控制。
三、部件组成与结构
1.多功能方向盘及操作拨杆
多功能方向盘左侧的按钮(见图3)是ACC系统的操控中心,按键功能如下:ON/OFF:开启关闭键。
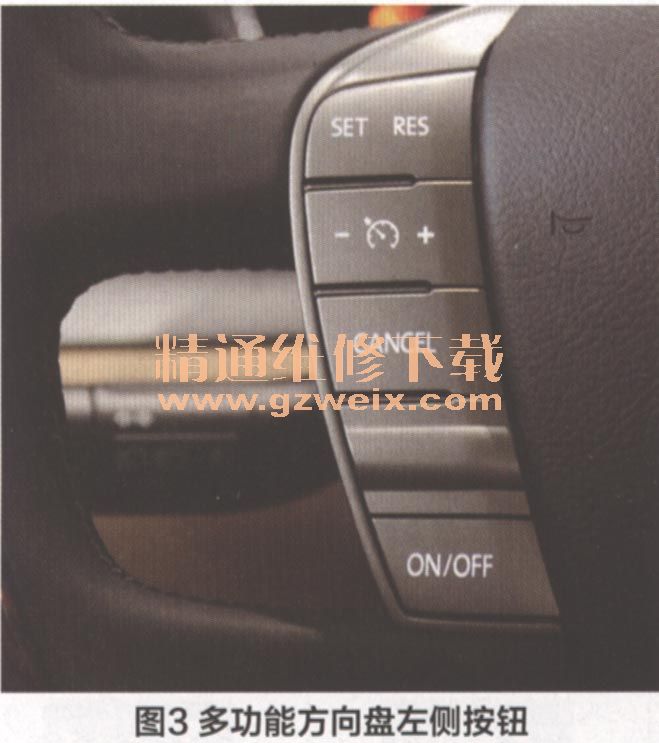
SET:设置当前车速,通过下方“+”、“-”按键调整理想车速。
RES:复位按键,将车速复位到设置速度,通过下方“+”、“-”按键重新调整车速。
CANCEL:取消按键。
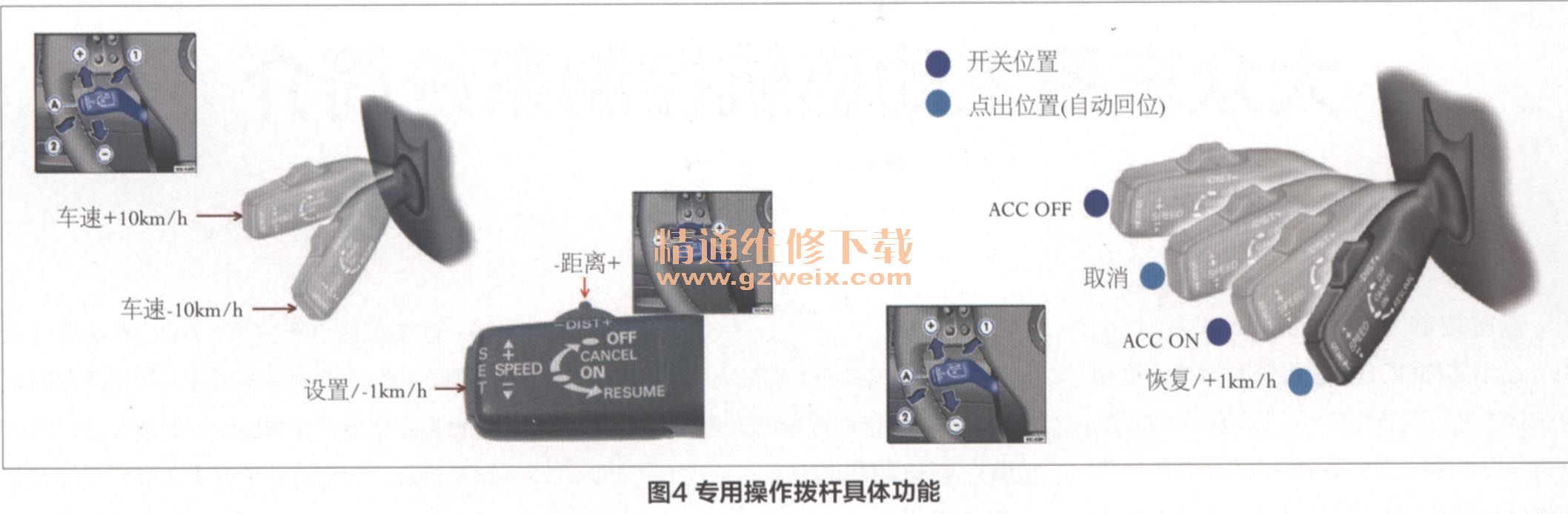
ACC系统设定值存储在转向柱控制单元。制动踏板、油门踏板、挡位动作时,ACC系统停止工作。有些车辆为了使驾驶员操作简便,在方向盘左下方设置了专用操作拨杆,其具体功能如图4所示。
2.组合仪表上的ACC显示器
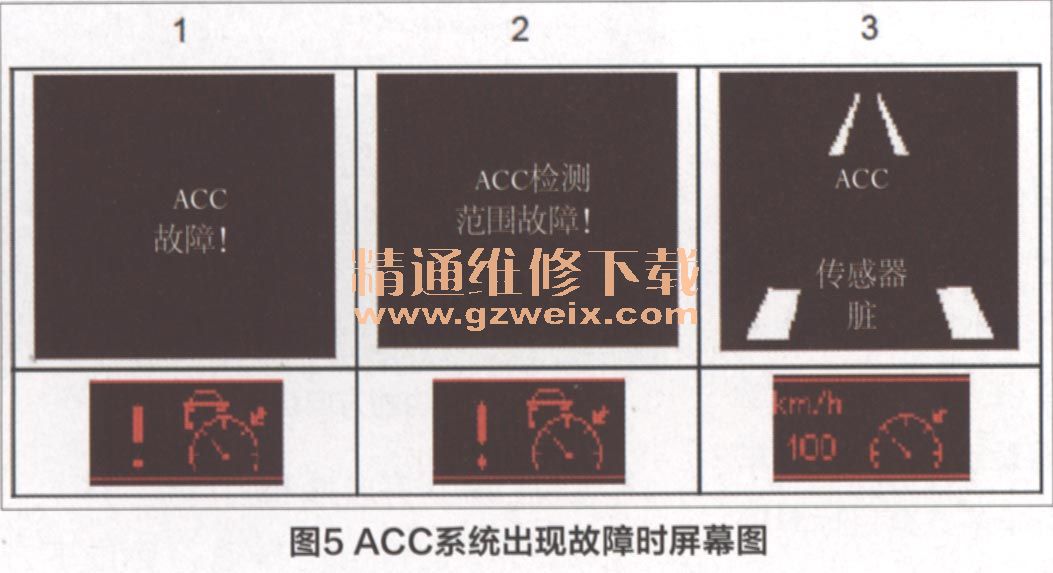
汽车仪表盘中央为多功能显示器,ACC系统工作状况在显示器上一目了然。车速表外圆由二极管指示ACC系统设置车速。当ACC系统出现故障时屏幕如图5所示。
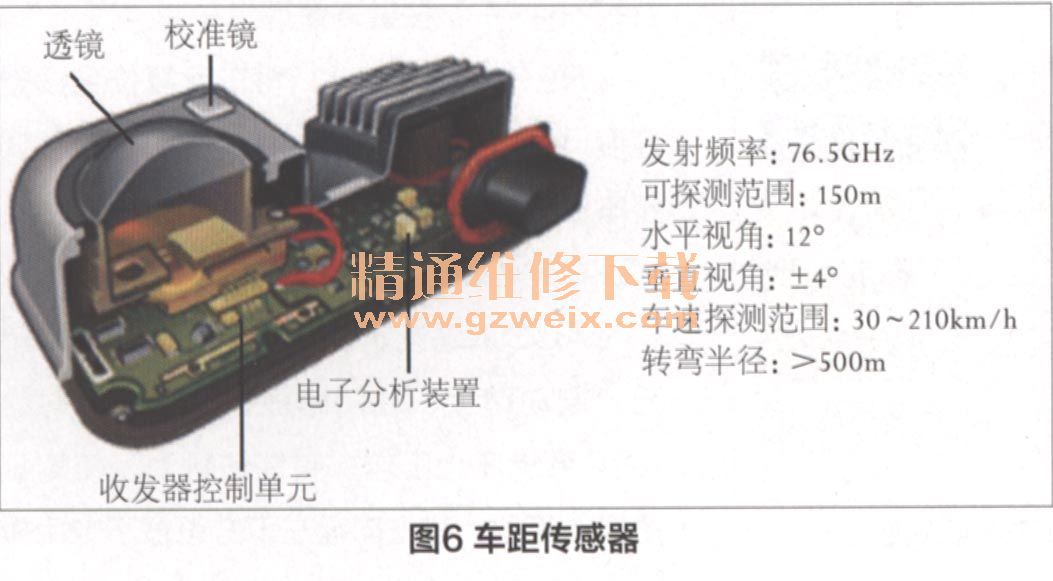
3.车距传感器、车距控制单元
(1)安装位置
传感器安装在前保险杠中央或车标后部位置。
(2)构造
传感器和控制单元集成为一体,控制单元把前车的速度、位置经计算处理后把需要调整的数据通过CAN总线发送到ECU,ESP, AT控制单元。
车距传感器护盖采用雷达信号可穿透的金属锢作为镀层,因此装用ACC系统的车标不能互换。为防止雨、雪、冰对传感器的影响,护盖表面通电可产生热量。为保证传感器工作的可靠性,护盖表面应保持清洁,事故车修复时传感器及车标应避免油漆、不干胶附着在表面。
(3)车距传感器工作原理
车距传感器(见图6)依靠电磁波工作,以光速发射出调频信号,经物体反射后接收返回信号。信号自发射出到接收的时间差值经控制单元计算后即为前车的距离。
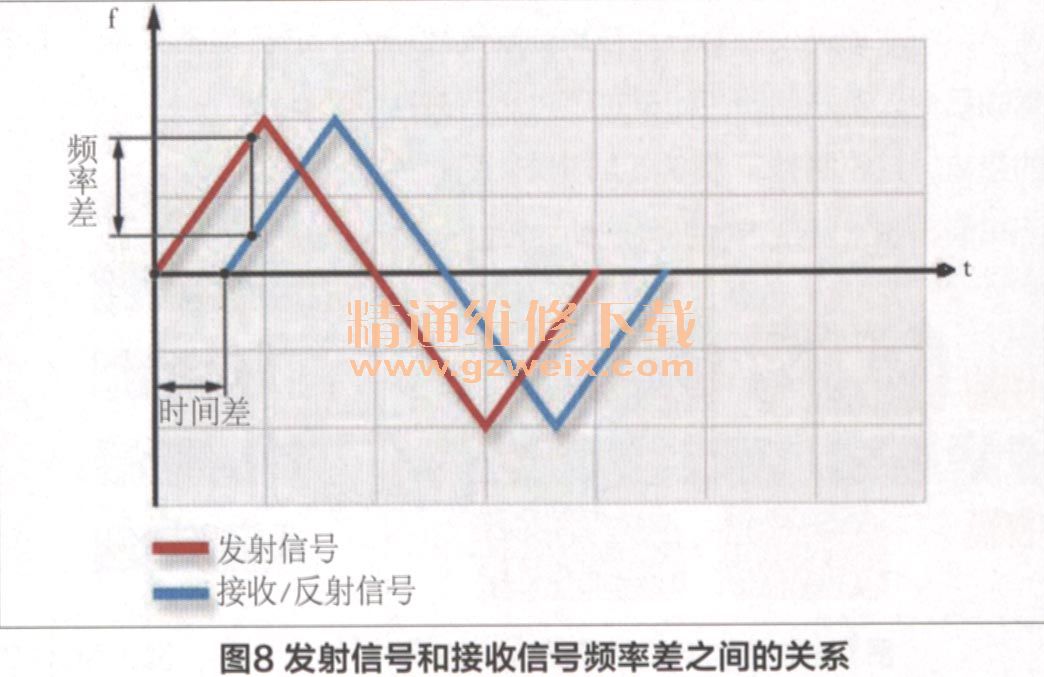
发射波为高频连续三角波,频率随时间变化。雷达接收的回波频率与发射的频率波形相同,只是有一个时间差,电控单元利用时间差可计算出目标距离。
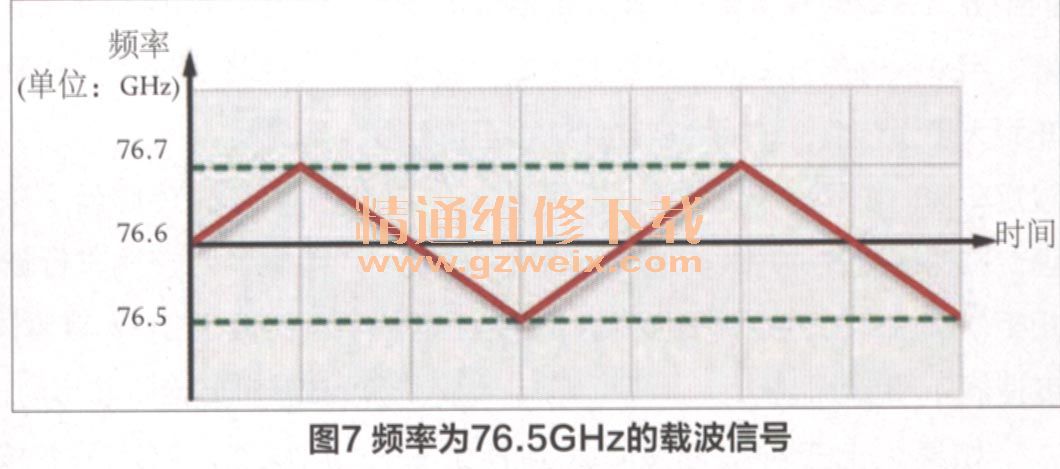
ACC系统将频率变化(调频)速率为200MHz/ms的超高频震荡波(频率随时间变化)作为发射信号,频率为76.5GHz的载波信号(见图7)作为输送载体。
发射信号和接收信号的频率差取决于物体之间的距离,距离越大,频率差就越大(见图8)。
①车速测量
当鸣着警笛的汽车由远处经过观察者时,汽笛的声调会由高变低,这是因为声波振动的频率决定声调的高低。声波频率高,声调听起来就高,反之则听起来较低,这种现象就是多普勒效应。
")
")
")
")

