・上一文章:分析拖拉机半分置式液压系统故障
・下一文章:车辆启动瞬间电压降低的原因及解决方案
4 组合仪表故障诊断
该组合仪表支持在线测试,支持基于CAN总线的OBD,同时支持标准KWP2000协议。
4.1OBDSupport在线诊断支持
OBD可以由K线串行通信和CAN线通信同时支持。
在线诊断通信在K线串行通信上实现时,其参数为:①速率10400;②数据位8;③校验位无;④停止位1。
支持的地址定义如下:①CAN线诊断———0x7EB(仪表到测试仪)/0x7E3(测试仪到仪表);②K线图4组合仪表电气原理框图诊断———仪表地址0x15,测试地址0XF0。
4.2支持的CAN线诊断
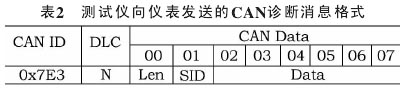
1)测试仪向仪表发送CAN诊断消息,CAN消息头格式见表2。
2)仪表向测试仪发送CAN诊断消息,其CAN消息头格式见表3。
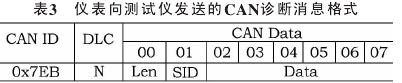
表2中CANID是CAN诊断消息标识号0x7E3,表3中CANID是CAN诊断消息标识号0x7EB。表2和表3中,DLC为CAN消息长度,包括Len、SID和Data;Len为诊断消息长度,包括SID和Data;SID是诊断服务标识;Data为诊断数据,依各诊断服务不同而相应变化。
5 试制、试验与PPAP
5.1样件试制与测试
根据设计结果做出了组合仪表样件,进行了装车及性能测试,发现了一些问题,并进行了解决。
1)车辆在静止或断开点火开关时车速表指针不能回到零位。
问题解决:经现场确认,该不归零现象为仪表机械问题,原仪表规范里面规定指针允许在0刻度以上3°以内的偏差,经过调整,使指针与0刻度对齐,要求仪表指针与0刻度的偏差控制在半个指针格以内,并对相关资料进行更改。问题已解决。
2)时速在100km/h以上时,时速表在100~120km/h之间摆动幅度大,不稳定。
实车测试:将CAN线短接,暂时中断仪表的CAN线输入,仪表选用直接从车速传感器采集的信号。指示正常,未出现抖动现象。恢复CAN通信,仪表车速出现抖动,并且在130km/h左右也有该现象,仪表车速值与CANoe读出的发动机ECU输出的车速值一致,并且在读出的发动机ECU数据中,所有个位数为4、9的数值都没有,直接从103km/h跳到105km/h,108km/h跳到110km/h,93km/h跳到95km/h等数值。黄板车台架试验:用信号发生器给发动机ECU输入车速为104km/h的脉冲信号,但在发动机ECU输出的数据中未发出104km/h这个值,车速直接为103km/h或105km/h,同时仪表车速指针出现抖动现象。直接由信号发生器发脉冲给仪表,仪表显示正常,没有抖动现象。因此该问题判定为发动机ECU发出的信号存在漏洞,需完善。经过完善发动机ECU数据并解决CAN信号后,问题已解决。
3)紧急制动时车速表失效,行驶十几公里后又恢复正常。
经过检查,查出是车速传感器失效导致。更换上新的车速传感器后,测试检查,紧急制动时仪表车速显示正常,未出现失效现象。问题已解决。
5.2组合仪表PPAP
根据正规程序,完成了组合仪表的PPAP工作,组合仪表已批量生产,并且完成了E-MARK认证。组合仪表随同整车通过了出口欧洲的认证。该组合仪表随同整车顺利销售到中国、欧洲及遵守欧标的国家和地区。
6 结语
组合仪表是汽车上的主要显示、指示部件,关系到操作的安全性、驾驶舒适性、节能等许多方面。
某款乘用车的组合仪表的设计,考虑兼顾目标市场中国、欧洲及遵守欧标的国家和地区的法规及市场需要,拟定需要显示的内容。
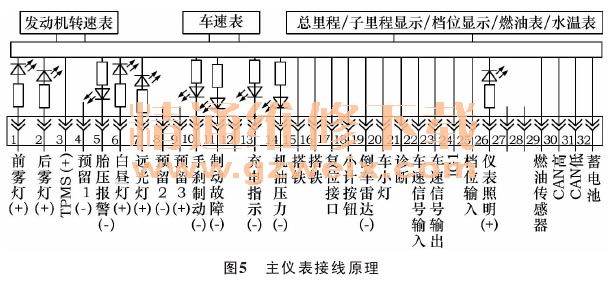
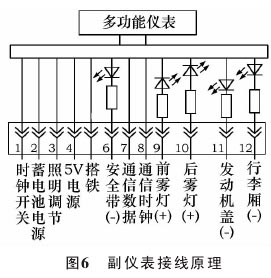
为了布置空间及人机工程的需要,设计了主仪表和副仪表分别显示。为了信息共享及快速通信的目的,引入了CAN网络。根据仪表的功能进行了组合仪表的整体布置,做出了组合仪表电气原理框图和接线原理图。
为了组合仪表的在线检测及故障排除,引入了组合仪表故障诊断系统,并且支持基于CAN总线的OBD,同时支持标准KWP2000协议。
据设计结果做出了样件,进行了试制、测试,结果达到了技术要求。PPAP完成后,组合仪表已批量生产,随同整车通过了出口欧洲认证,可以在中国、欧洲及遵守欧标的国家销售。
")
")
")
")

