・上一文章:浅析汽车变速器的保养
・下一文章:大众斯柯达速派车窗玻璃升降器工作异常
绝大多数汽车检测站是采用便携式制动仪路试来检测车辆行车制动性能的,该制动仪是一种减速度测量仪器,通过车辆路试制动充分发出的平均减速度(简称MFDD)和制动协调时间来评价车辆的行车制动距离,通过制动跑偏量来评价车辆的行车制动稳定性。制动仪无法事先测量和显示车速,只能事后根据全过程所测的瞬时减速度和时间来推算制动初速度和制动距离,车辆实际路试操作的制动初速度是一个随机值,而标准规定的制动距离、MFDD、制动稳定性是在规定制动初速度条件下的限值,制动初速度对MFDD的检测影响很小,可以忽略不计,但对制动距离和制动跑偏量的影响很大,只有把随机制动初速度所测值校正在规定制动初速度的制动距离和跑偏量,才能保证检测的准确性,避免错判。现有路试行车制动稳定性是定性检测,没有规范跑偏量的定量检测,在规定车道内的制动跑偏量可以是限值的2倍,如向左制动跑偏可沿右车道线行驶。跑偏量限值应该以车辆在试车道中线行驶制动来规范,等于0.5x车道宽度限值-车宽)。
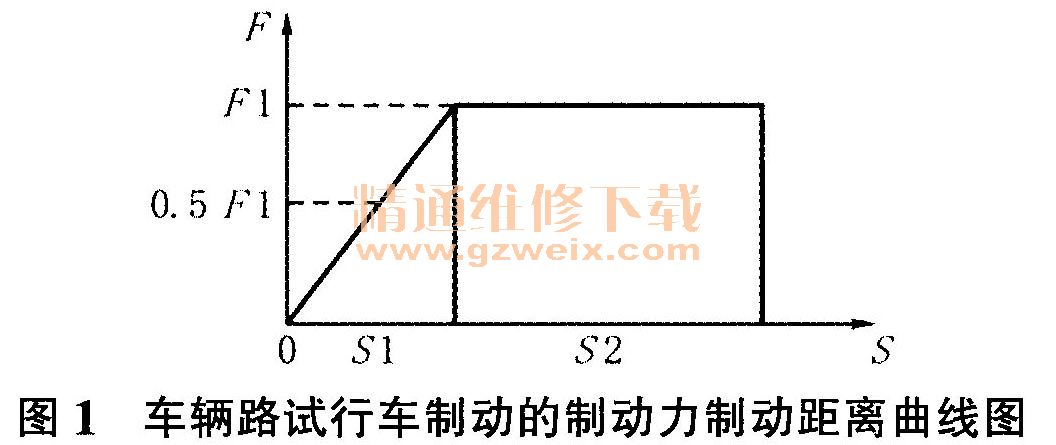
用便携式制动仪可以测量MFDD、制动初速度及制动距离,用直尺可以测量制动跑偏量。图1为车辆路试行车制动的制动力(F)与制动距离(S)曲线图,横坐标是制动距离,单位为米(m);纵坐标是制动力,单位为牛顿(N);S1是制动力增长过程的制动距离;S2是制动力稳定过程的制动距离;F1是测量MFDD取值范围内的平均制动力;曲线所包围的面积等于制动全过程制动力所做的阻力功。
路试制动距离和跑偏量的修正方法如下。
(1)车辆在制动初速度的一定范围内进行路试行车制动,测得制动初速度V1、MFDD、制动距离S,用直尺测量制动跑偏量h。
(2)把制动全过程分为制动力增长过程和制动力稳定过程,实际制动距离S=S1+S2,设所检车辆的平移质量与转动件的当量惯量之和为m,单位为kg。
(3)在制动全过程中按功能原理有等式1;0.5×m×V12=0.5×F1×S1+F1×S2; V,单位为m/s,把V1所测单位km/h换算成单位m/s。
(4)假设该车辆在标准规定制动初速度V0路试行车制动,而且F1和S1都不变,只是制动力稳定过程的S2变为了L2,同一车辆m也不变,把V0单位换算成m/s,按功能原理有等式2 ; 0.5×m×V02=0.5×F1×S1+F×L2。用等式2减去等式1有等式3 ;L2-S2=0.5×m× (V02-V12)/F1。因为F1/m=MFDD,所以L2 S2=0.5× ( V02-V12)/MFDD,规定制动初速度的制动距离L=S1+L2=S2 +0.5×(V0 2-V12)/MFDD=S+0.5×(V02-V12)/MFDD。
(5)假设制动跑偏量与制动距离成正比,规定制动初速度的制动跑偏量H=h×L/S。
(6)以一台空载质量为9t的货车路试行车制动为例,按国标《机动车运行安全技术条件》(GB 7258-2012)规定制动初速度V0=30 km/h=8.333 m/s,用便携式制动仪路试行车制动检测,测得制动初速度V1=32.75 km/h=9.097 m/s,制动距离S=10.49 m,MFDD=5.59 m/s2,制动跑偏量h=320 mm,计算规定制动初速度V0=30 km/h的制动距离L=10.49+0.5×(8.3332-9.0972)/5.59=9.3 m。规定制动初速度的制动跑偏量H=320×9.3/10.49=284 mm。该车辆的车宽为2 430 mm,路试宽度限值为3 000 mm,跑偏量限值为0.5×(3 000-2 430)=285 mm,如不修正,320 mm的跑偏量评价制动稳定性不合格,而修正后284 mm的跑偏量合格。
通过路试制动距离和跑偏量的修正,能够克服便携式制动仪难以保证规定制动初速度的缺限,从而准确检测和评价跑偏量。即使是采用五轮仪等路试行车制动,也难以保证制动初速度,该方法同样适用其对制动距离和跑偏量的修正。
")
")
")
")

