・上一文章:丰田锐志轿车有时无法换档
・下一文章:汽车用油压开关防水研究
摘要:按一般PWM信号和总线信号两种不同的信号形式分类,介绍新型汽车仪表对车速里程信号的采集与处理的电路、软件控制逻辑等,并分析了匹配中需要注意的问题。
汽车车速里程表用于指示车辆的行驶速度和里程,是车辆必需装备。作为仪表开发者来说,设计的车速表必须保证运行平稳顺滑、指示及时准确,而里程表则必须指示准确而且可靠。随着汽车技术的日益发展,各种电子传感器、电控模块在车辆上得到了广泛的使用,车速里程信号的形式也由单纯的机械软轴驱动式逐渐演变为一般PWM电子信号和有固定通信协议的总线信号式。同时车辆上的电磁环境也越来越复杂,信号形式的多样化和复杂的电磁环境对汽车车速里程表的开发提出了更高的要求:车速里程表必须具有更完善的信号采集与处理的能力。
1 汽车车速里程表工作原理
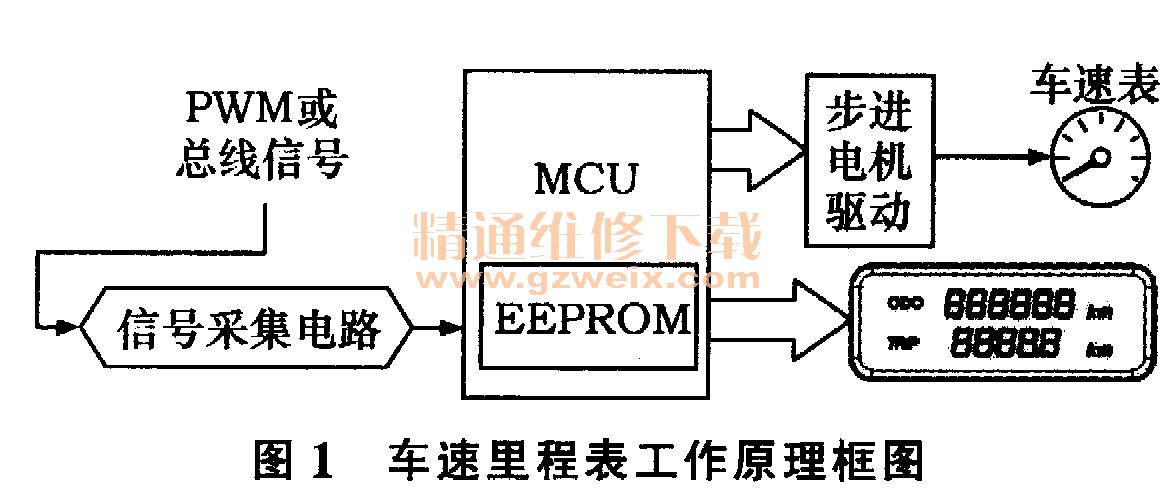
汽车车速里程表工作过程如图1所示。首先通过采集电路获得车速里程信号(PWM或总线信号),然后MCU对信号进行数据处理,一方面输出运行命令,通过电机驱动模块使电机带动指针运转,将车速值在表盘上指示出来;另一方面,MCU直接驱动段码式LCD显示屏,将计算出的新里程值显示在屏上,同时每隔一定的里程(一般为1 km), MCU将里程数据存储到自身集成或外部的只读存储器EEPROM内,以免数据掉电丢失。
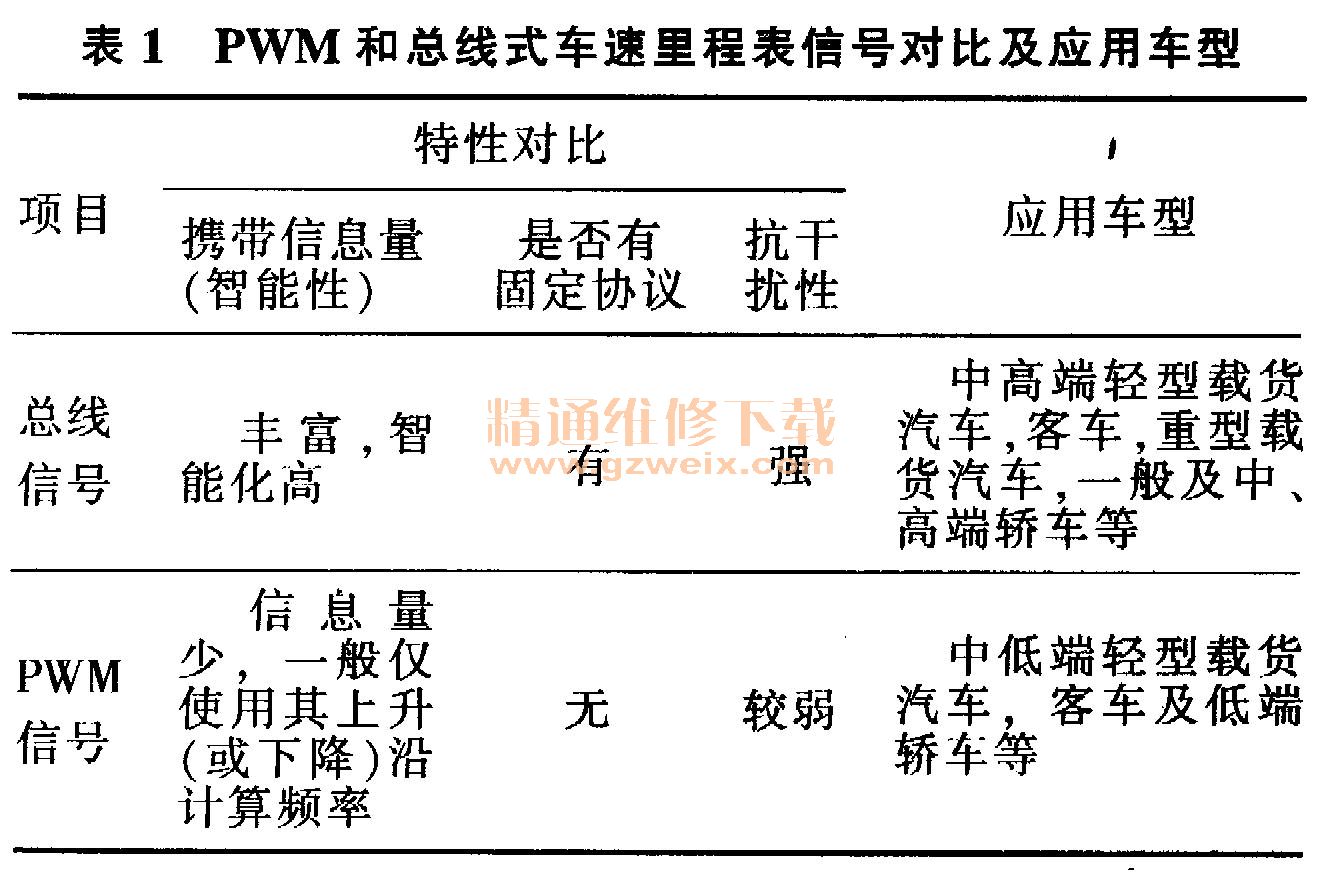
2 两种信号特性对比及应用车型介绍
按照固定协议发送的特殊PWM信号称为总线信号,除总线以外的PWM信号为一般PWM信号,两者的特性对比和相关应用车型如表1所示
3 总线式车速里程表的信号采集与处理
3.1总线信号
总线指有固定协议的CAN, K或LIN总线等,由于现在常用的以CAN总线居多,本文主要针对CAN总线进行介绍。CAN总线信号格式一般按照SAEJ1939-71的规定。
3.2数据的采集和处理
3.2.1数据采集
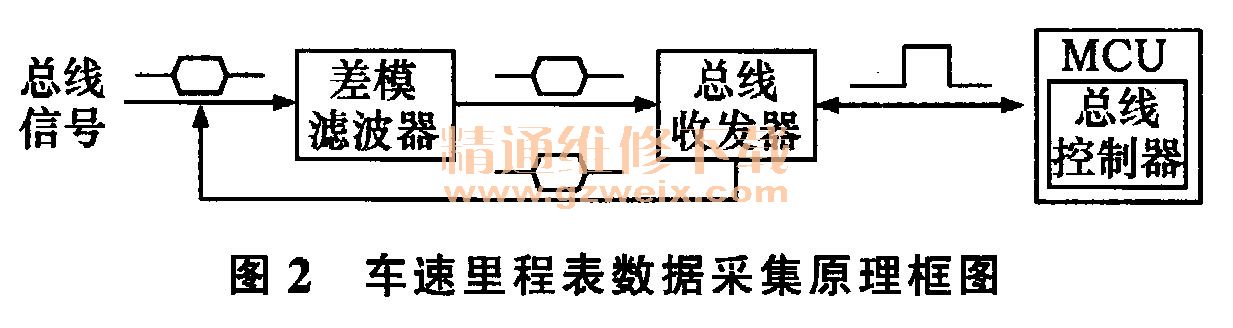
CAN总线本身具有很完善的规范(通信协议),从而使信号的传输具有很强的容错性和抗干扰能力,在保证正确物理连接(CAN总线的拓扑结构、终端电阻等)的情况下,信号传输相对稳定。硬件上信号采集不需要附加电路,一般在总线收发器前端加一差模滤波器即可,其原理框图如图2所示。
3.2.2数据处理
对于总线式车速里程表,仪表关注的重点在数据的处理上。
3.2.2.1总线上数据传输
车速里程数据发送单元可以是ABS控制器、行驶记录仪等可检测车速的控制单元,接收方一般是作为显示单元的仪表或者其它需要车速的控制单元。
采用总线方式传输车速、里程时,需要注意:①总线上所有节点只能有一个是发送单元,其它均为接收单元,以保证数据的一致性;②发送节点发送的车速、里程数据必须为当前的真实值,可以进行低通滤波等初步信号处理,但不能进行附加公差等进一步的处理,而应由接收到信号的节点按自身需要对信号作进一步处理。
3.2.2.2汽车仪表对车速、里程处理的基本策略
首先,仪表通过一定算法解析出车速里程数据,具体的数值解析公式如下
式中:v—解析得到物理值;vr一接收到的值;fa一比例因子;Of—偏移量。
1)车速信号的处理:①对接收到的车速值需进行数字滤波,滤掉错误值,数字滤波可采用递推数字平均值、限幅、中位值滤波等其中的一种或几种算法的组合。②在车速显示上,一般在车辆装备其它显示车速的设备时,多个设备显示值尽量(考虑指针式仪表的视觉偏差)保持一致;而仅装备仪表一种显示设备时,可以对接收到的值进行加权处理,在国标允许的范围内适当放大显示,以提高行车安全性。③必须对信号进行超时处理,即信号中断或不正常时,超过一定时间后,车速表必须做出相应的反应,一般是指针停在“0”位(屏显式车速表显示“_”)。
2)里程信号的处理:①对接收到的车速值需进行数字滤波,滤掉错误值,数字滤波可采用递推数字平均值、限幅、中位值滤波等其中的一种或几种算法的组合。②在里程显示上,里程显示必须准确,在车辆装备其它显示车速的设备时,多个设备显示值要保持一致。③必须对信号进行超时处理,在信号中断或不正常时,超过一定时间后,里程表必须做出相应的反应,一般是维持显示上一个有效里程。
4 PWM式车速里程表的信号采集与处理
4.1 PWM车速里程信号
PWM车速里程信号一般由车速里程表传感器或者车辆上安装的控制单元输出,控制单元输出的PWM车速里程信号,也是通过采集车速里程表传感器信号获得的,汽车一般不使用GPS信号作为标准车速信号。
4.1.1车速里程表传感器
车速里程表传感器是指安装在变速器或车轮轮毂上的,可以通过检测车辆运动产生相应电信号的装置。
车速传感器的种类有很多,按功能分可分为智能型(可输出实时车速信号和加密的数据信号)和普通型(只输出实时车速信号),按接口形式可分为接触式和非接触式,按信号产生方式可分为霍尔式和磁感应式等。常用的霍尔式车速里程表传感器如图3所示。
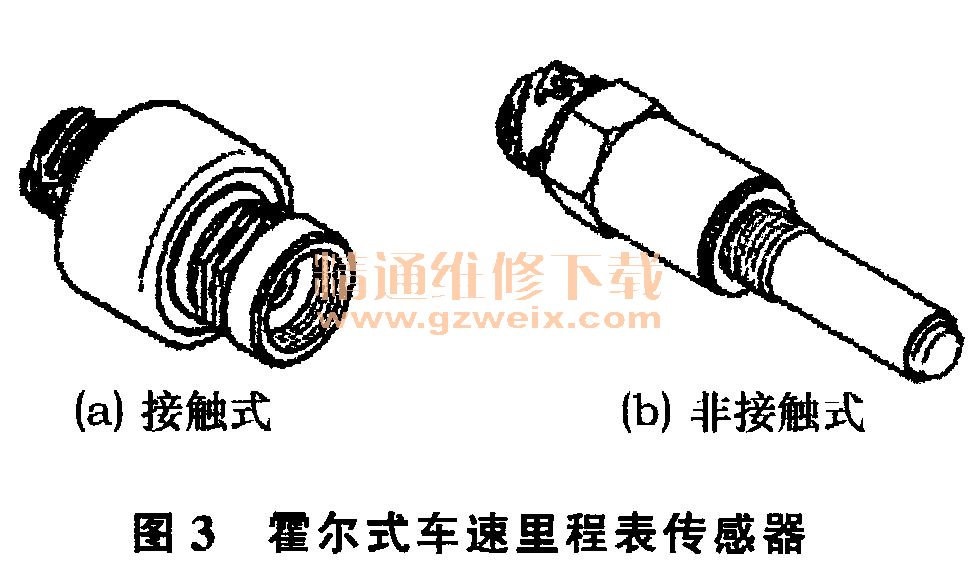
图3a为接触式霍尔传感器,图3b为非接触式霍尔传感器,具体采用哪一种传感器取决于车辆上车速输出机构对外接口的形式。
4.1.2 PWM车速里程信号的输出接口电路
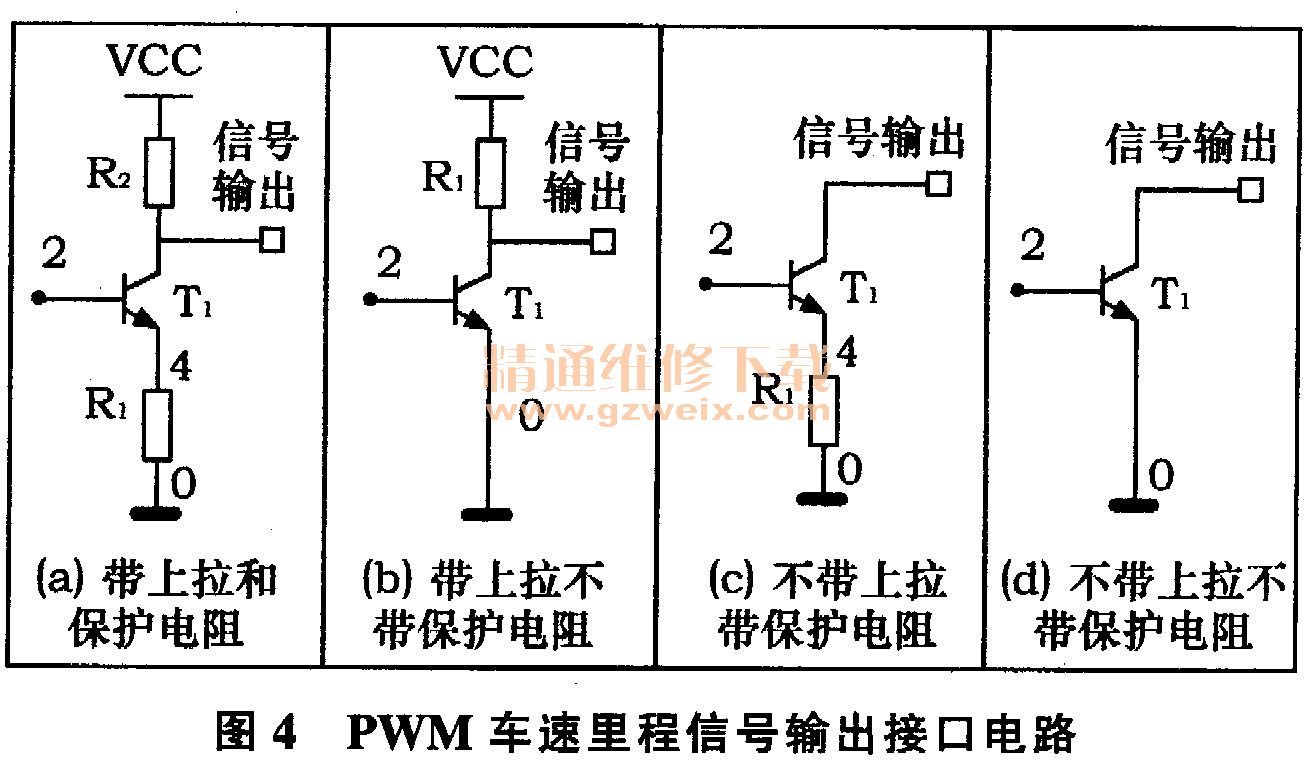
虽然车辆采用的控制单元和车速里程表传感器的种类繁多,采用的电路形式也是多种多样,但不论是传感器还是控制单元,其车速里程输出接口电路的基本原理是相同的,一般可分为带上拉和不带上拉,带保护电阻和不带保护电阻这几大类,如图4所示。
4.2 PWM车速信号的采集与处理
无论是控制器调制后输出的PWM信号,还是由车速里程表传感器直接输出的PWM信号,受车辆复杂电磁环境的影响,波形都会有波动,而且PWM信号的传输不像CAN总线信号传输那样具有很强的容错性以及抗干扰的能力,因此在PWM信号的采集电路设计上,除考虑参数匹配性外,还要进行滤波等处理。
4.2.1信号采集电路
对于PWM(信号)式车速里程表,仪表处理的重点在信号的采集上。
4.2.1.1参数匹配
参数匹配是指信号采集电路根据信号产生电路的各项参数,例如输出电压、输出电阻等来计一算自身电路各个元件的参数值,从而保证在正常工作电压范围内,信号都可被MCU端口准确地捕捉。
以某车型的仪表采集电路为例,对参数匹配中需注意的问题进行分析。仪表车速信号采集电路如图5所示。
图5是一种比较简单常用的车速信号采集电路,G是仪表引脚电容,马是反向保护二极管,嘛和R,构成上拉电路,R3. R2.几构成低通滤波电路,同时R1、R3、R2构成了分压电路,几是稳压二极管(保护MCU)。
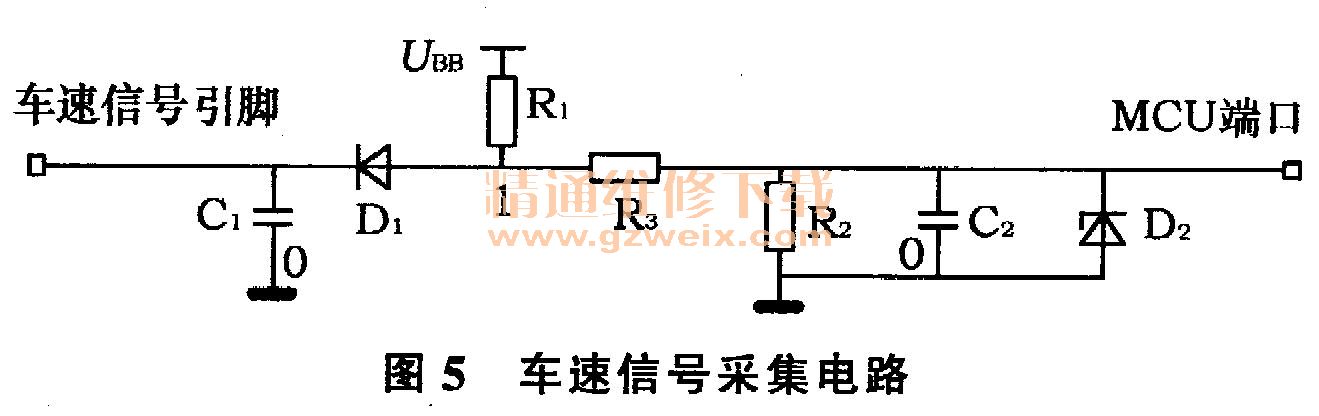
1)基本工作原理:当外部信号为低时,节点1处的电压被传感器回路拉低,从而使MCU端口处电压为低;反之当外部为高阻态时,MCU端口得到上拉电压UBB产生的分压UBB×R2/(R1+R3+R2),呈现高电平状态。当车辆运行使车速里程表传感器发出的车速信号不停地在拉低一高阻两者反转时,MCU端口就可以不断捕捉到上升(或下降)沿,从而实现了车速里程的测量。
2)参数的匹配:以图5所示电路为例,要保证MCU端口可以准确地捕捉到上升(或下降)沿,就要保证输入MCU端口的电压在其识别范围内。MCU可识别的电压范围在其手册中有明确的规定,一般UIL不大于0.3 Ucc, Uih不小于0.6Ucc,也就是说低电平不大于1.5 V,高电平不小于3V。
在计算中要充分考虑传感器的接口电路,因受传感器上拉电源和保护电阻的影响,图4中4种接口电路就必须采用不同的参数,针对上述4种接口电路的匹配计算过程是比较清楚的,在此不再列出详细的计算过程。
")
")
")
")

