・上一文章:剖析丰田大霸王CAN技术
・下一文章:基于TFT显示技术的组合仪表设计
摘要:针对AMT汽车动力控制系统的特点,设计包括发动机ECU, AMT变速器TCU和电子油门ECU在内的AMT汽车动力控制系统CAN总线网络;基于CAN2.OB与J1939协议,制定该网络的通信协议;应用Vector公司的CANoe软件建立系统模型,并进行总线通信性能的仿真和负载率的分析。结果表明:本系统可以完成系统要求功能,通信品质可靠,满足实时性要求。
AMT汽车是装配有AMT自动变速器的汽车,一般在小型乘用车和商用车上比较常见。AMT自动变速器是在不改变机械变速器原有构造的基础上,增加一套选换档机构和控制系统(包含变速器控制器TCU ),利用电子电控技术实现离合器的分离与接合、变速器的选换档、发动机控制等过程的自动化。AMT变速器具有操作简单、传动效率高、改装成本低等优点,有较好的发展前景。
自动变速器的加入,使汽车上电控单元(ECU)的数目增多,在此情况下,如何设计有效的网络结构,使各ECU之间合理地互联,实现信息的共享,并保证控制系统可靠性已成为必须解决的问题。车载网络主要包括用于底盘控制和动力传动系统的高速CAN总线,应用于车身的低速CAN总线和LIN总线,应用于车载信息娱乐系统的MOST总线和应用于X-by-wire技术的FlexRay总线。
本文采用德国Vector公司专业的系统级网络开发与测试工具CANoe,设计了包含发动机ECU,AMT变速器TCU、电子油门ECU等控制器在内的AMT汽车动力总成控制系统总线网络。各控制器间通过CAN总线进行数据交换,并完成了协议制定、模型建立和通信仿真等一系列工作,最终实现了AMT变速器TCU和电子油门ECU协同对发动机输出转速和转矩的有效控制。本文所设计的总线网络及控制系统已应用在某6速商用车动力总成开发项目上,可满足系统总体要求,具有较好的性能。
1 动力总成控制系统总线网络设计
发动机的转矩、转速和油门开度值三者之间存在特定的函数关系,当确定转矩和转速时,可以确定油门开度值。发动机制造商有时出于技术保护、安全等方面的考虑,会把总线对发动机的转速和转矩控制使能位关掉,这使AMT控制器TCU无法通过总线的形式实现对发动机的控制。因此,本设计为实现对发动机转速和转矩的控制,在加速踏板与发动机间连接一个电子油门,将电子油门ECU、发动机ECU和AMT的TCU分别以节点的形式连接到总线上;这样,可通过AMT控制器TCU和电子油门ECU实现对发动机转速和转矩的控制。其拓扑结构如图1所示。

正常行驶情况下,电子油门根据驾驶员控制的加速踏板的位移,输出相应的电子油门模拟量信号,并发给发动机ECU,从而使发动机实时地对加速踏板进行跟踪。当AMT需要对发动机进行控制时,TCU向CAN总线发送油门控制报文,电子油门从总线上接受该报文,从而控制电子油门模拟量信号的输出,最终实现AMT控制器TCU对发动机转矩和转速的控制。同时,电子油门ECU将加速踏板的信号和电子油门的输出信号发送到CAN总线上,发动机ECU也将发动机的状态发送到总线上,从而实现动力总成系统信息的共享。
2 动力总成控制系统CAN通信协议制定
本文基于CAN2.OB和J1939协议,制定了AMT汽车动力总成控制系统的通信协议。J1939协议是目前在大型汽车中广泛应用的通信协议,J1939协议以CAN2.OB协议为基础。总线的速率为250 kB/s ,为高速CAN总线,此速率可满足商用车辆对总线速度、传输距离和负载率的要求。J1939协议使用29位的扩展标示符,对网络节点的命名、地址、通信方式和报文发送的优先级进行了规定,并对各节点的信息内容进行了详细说明。参照J1939协议,对本系统的节点地址、报文优先级、名称、ID、发送周期等进行设置。
总线上主要包括7个报文,各节点接收和发送报文的情况见表1。

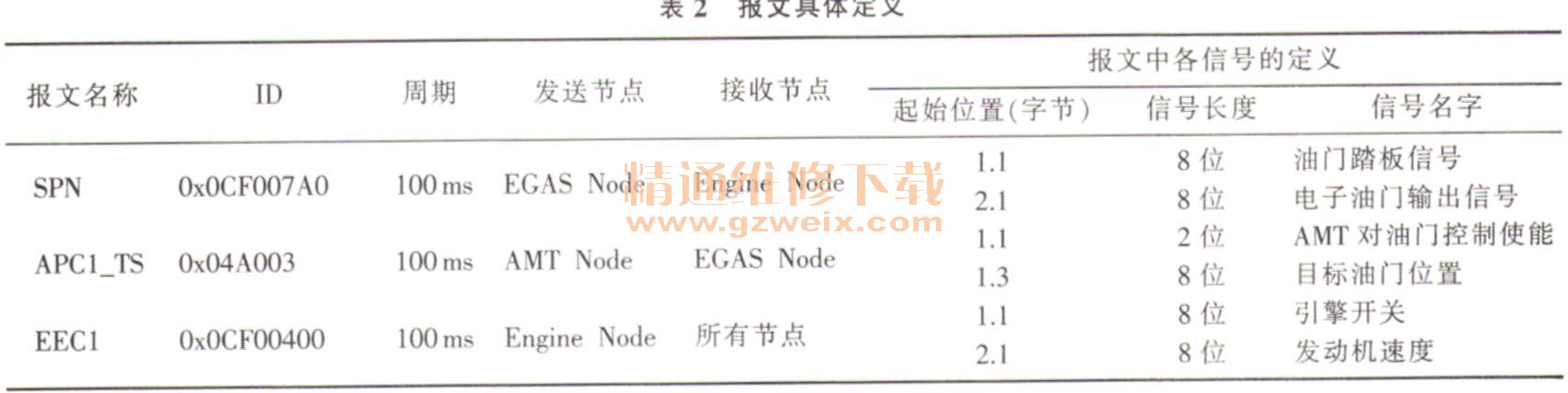
表2分别列出了定义的3个较为重要的报文:SPN、APC 1_S、EEC1。定义报文时需要同时定义报文的名称、标识符、发送周期、数据长度和报文所包含的信号数量。例如报文SPN的发送节点是EGAS Node,接收节点是Engine Node,主要功能是发送油门踏板信号与电子油门ECU输出的油门开度模拟量信号,发送给发动机ECU,从而来控制发动机的转速和转矩。为了满足电子油门ECU控制的实时性,报文SPN的发送周期设置为100 ms,分辨率设置为0.4%/位。
3 仿真模型建立
1)根据CAN总线系统方案,依据CANdb++数据库工具建立动力总成控制系统数据库。在数据库中加入仿真节点、信号、报文、环境变量等。使用CANdb++数据库工具,可以实时修改报文值,使总线的测试和仿真分析较为方便。
2)仿真配置(simulation setup)。根据CAN总线系统的拓扑结构对节点、仿真条件和仿真接口硬件进行配置,此时,需把之前设计的数据库文件加载到仿真系统中,使动力总成控制系统数据库与CANoe相互关联。
3)虚拟仪表板的配置(Panel)。虚拟仪表板可实现人机交互,能够直观地显示CAN总线各节点的工作状态。图2为动力总成控制系统的虚拟仪表板。

4) CAPL编程。CAPL语言是针对CAN总线系统开发的类似于C语言的编程语言。CAN总线上的节点通过CAPL语言编写程序模拟各个节点的行为,模拟实际节点报文的发送、接收和处理,仿真实际控制器的功能。
")
")
")
")

