・上一文章:试制新仪表里程偏小现象的改进
・下一文章:三洋32英寸LED液晶电视三无故障维修
2 控制装置操作流程
2.1自动操作流程
自动调整的控制流程如图2所示。
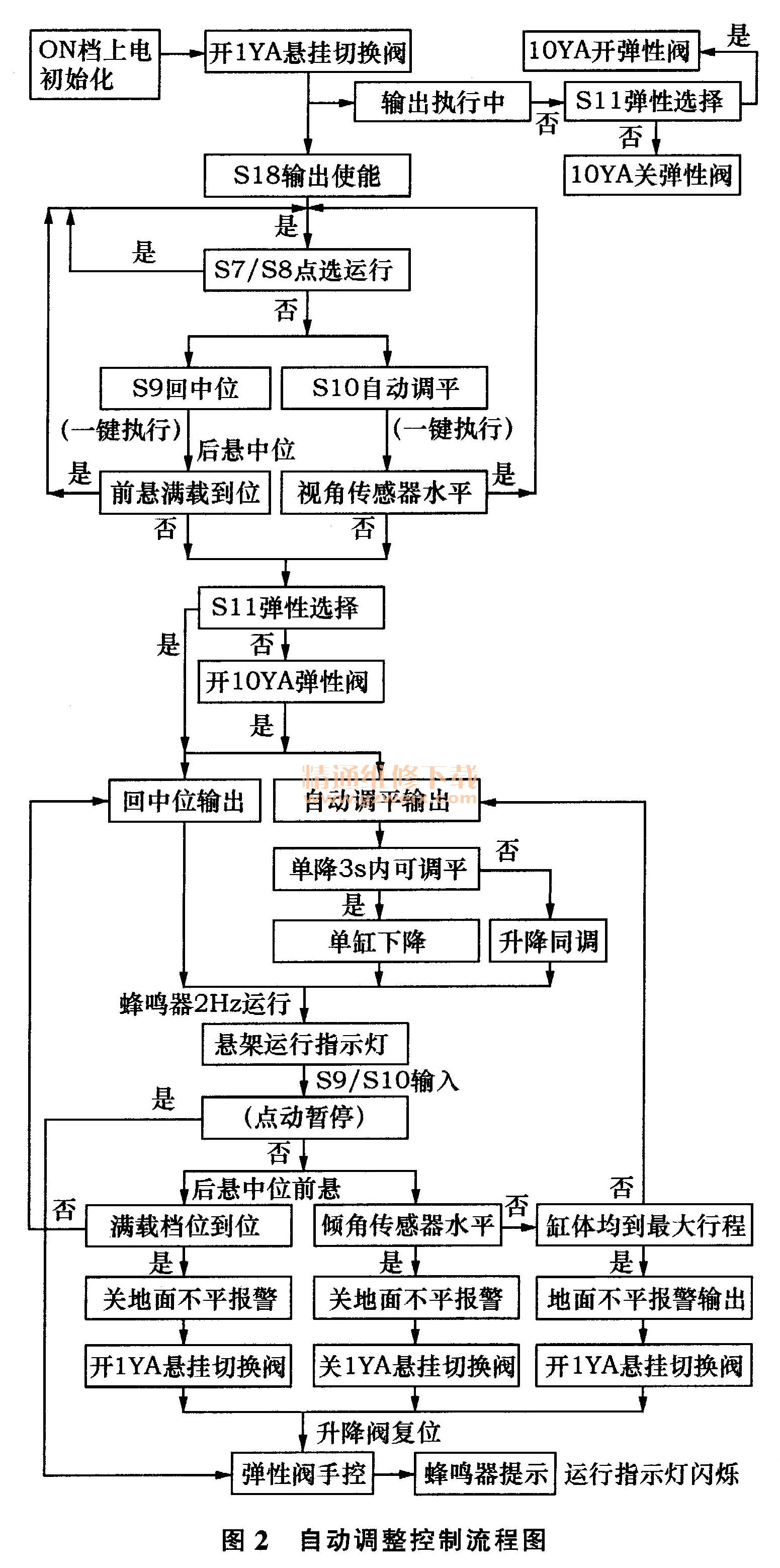
1)操作类型选择选中想要执行的自动操作类型:S10为自动调平,即控制器根据车架质心处的倾角传感器输入的模拟量信号,分析目前车架相对水平面的左右倾斜状态,做出左右水平度的调整,用于车辆停在倾斜路面装卸物料时使用。S9为回中位,即前悬挂自动运行到满载位置,后悬挂自动运行到中位位置,为矿用自卸车正常行车做准备。
2)控制输出系统上电时自动打开悬挂切换阀1 YA的输出,即切断了举升的油路。
当点选自动开关S117的自动调平档位后,如此刻无点动操作进行,系统处于空闲状态,则系统会检测倾角传感器的输出参数,判断出矿用自卸车尾桥的水平状态。当水平状态不在系统设置的安全范围内时,系统判断弹性阀状态,确保弹性阀打开后,将第2尾桥左侧2个悬挂油缸作为一组,右侧2个悬挂油缸作为一组,根据测量的倾角状态预判采用单侧下降方式调平所需操作时间。如果调整时间在3s内则采取单侧下降调平;如3s内无法完成调整操作,则系统预判后采取一侧上升一侧下降的两侧同调模式进行调平。调整过程中,蜂鸣器以2 Hz频率输出作为运行状态指示,仪表悬架运行指示灯亮起。在调整过程中再次点选S117调平档位则作为点动暂停。
假如车身左右倾斜过大,一侧到最大行程,另一侧也到最大行程,但是车架仍未调平,则仪表地面不平报警灯亮起,并保持1 YA悬挂切换阀打开,切断举升油路禁止举升操作,此时驾驶员应变更停车位再次执行调平操作,直到尾桥调平可以进行安全举升卸载。
当点选自动开关S117的回中位档位后,进行前部悬挂运行到满载位置,后部悬挂运行到中位的调整操作。
3)执行到位执行到位后,系统根据弹性阀控制开关的状态,将弹性阀开闭状态恢复,并将升降控制阀恢复;蜂鸣器和运行指示灯执行到位状态输出,工作频率如前所述。
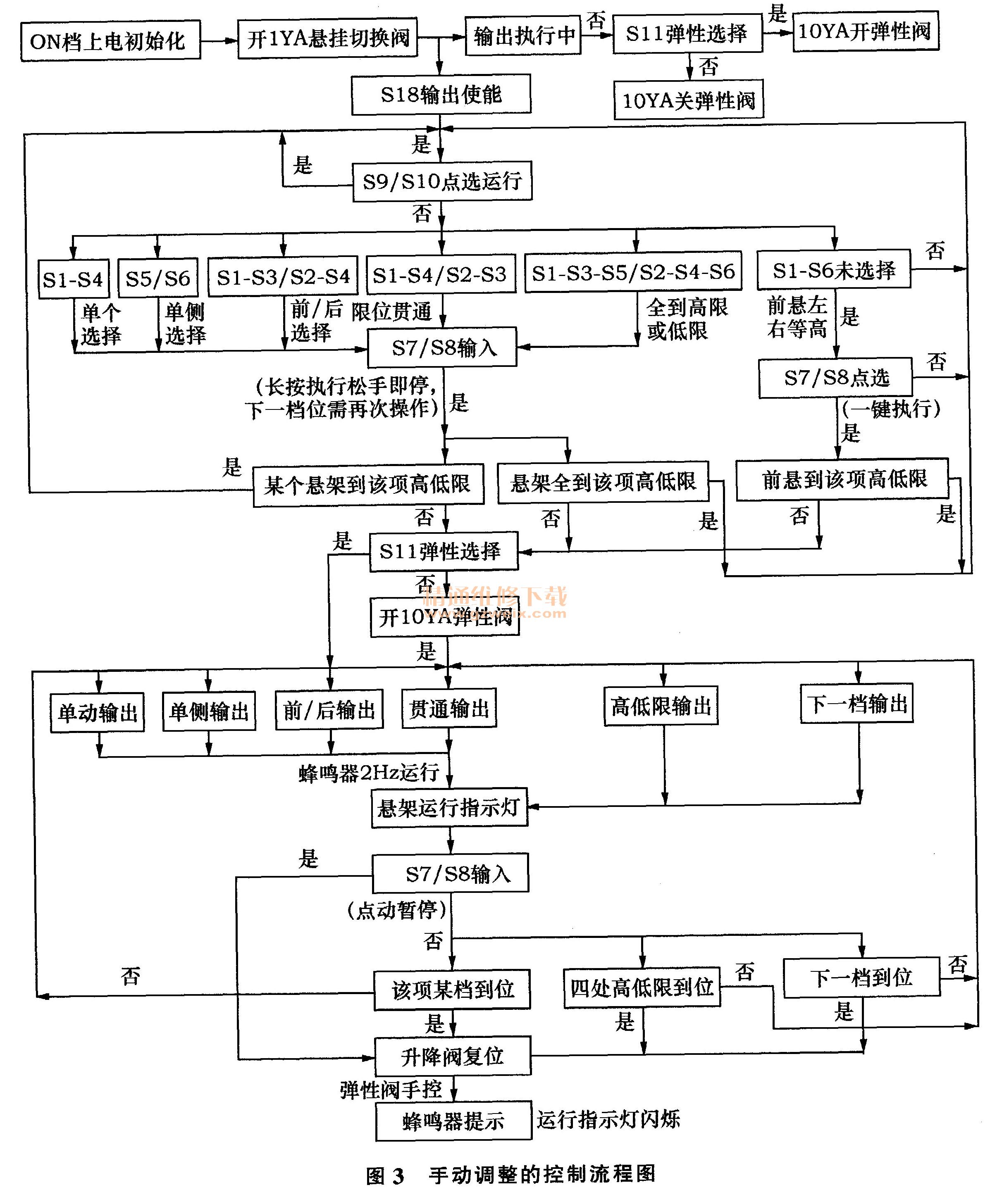
2.2手动操作流程
手动调整的控制流程如图3所示。
")
")
")
")

