用磁性材料制成的定子和转子可以形成闭合的磁路,线圈A、 B、 C、 D分别绕在极靴上,形成一个桥式回路。转向轴扭转变形的扭转角与转矩成正比,所以只要测定轴的扭转角,就可间接地知道转向力的大小。
在线圈的U、T两端施加连续的脉冲电压信号Ui,当转向轴上的转矩为零时,定子与转子的相对转角也为零。这时转子的纵向对称面处于定子AC、 BD的对称平面上,每个极靴上的磁通量是相同的。电桥平衡,V、W两端的电位差Uo=0。
当转向轴上存在转矩时,定子与转子的相对转角不为零,此时转子与定子间产生角位移θ。极靴A、 D间的磁阻增加,B、C间的磁阻减小,各个极靴的磁阻产生差别,电桥失去平衡,在V、W两端产生电位差。这个电位差与轴的扭转角θ和输入电压Ui成比例,从而可知道转向轴的转矩。
一种实际应用的转矩传感器结构如图4所示,其工作原理与上述基本相同,优点是便于安装。

②电动机、电磁离合器与减速机构
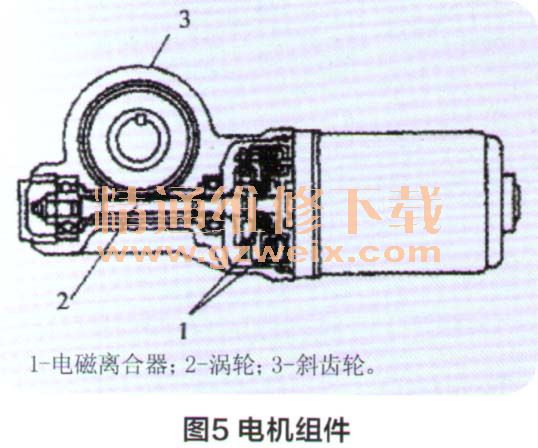
电动机、电磁离合器和减速机构组成的整体称为电机组件,其结构如图5所示。
a.电动机
转向助力电动机就是一般的永磁电动机(原理不再叙述),电动机的输出转矩控制是通过控制其输入电流来实现,而电动机的正转和反转则是由电子控制单元输出的正反转触发脉冲控制。图6是一种比较简单实用的正反转控制电路。A1、a2为触发信号端。从电子控制单元得到的直流信号输入到a1、a2端,用以触发电动机产生正反转。当a1端得到输入信号时,晶体管T3导通,T2管得到基极电流而导通,电流经T2管的发射极和集电极、电动机M、T3管的集电极和发射极搭铁,电动机有电流通过而正转。当a2端得到输入信号时,晶体管T4导通,T1管得到基极电流而导通,电流经过T1管的发射极和集电极、电动机M、T4管的集电极和发射极搭铁,电动机有反向电流通过而反转。控制触发信号端的电流大小,就可以控制电动机通过电流的大小。

B.离合器
一般使用干式单片电磁离合器,其结构如图7所示。工作电压为12V、额定转速时传递的转矩为15Nm,线圈电阻(20℃时)为19.5Ω。

其工作原理是:当电流通过滑环进人离合器线圈时,主动轮产生电磁吸力,带花键的压板被吸引与主动轮压紧,电动机的动力经过轴、主动轮、压板、花键、从动轴传给执行机构。
由于转向助力的工作范围限定在一定速度区域内,所以离合器一般设定一个速度范围,如当车速超过30km/h时,离合器便分离,电动机也停止工作,这时就没有转向助力的作用。当电动机停止工作时,为了不使电动机及离合器的惯性影响转向系的工作,离合器也应及时分离,以切断辅助动力。当系统中电动机等发生故障时,离合器会自动分离,这是仍可恢复手动控制转向。
上一页 [1] [2] [3] [4] 下一页
")
")
")
")

