・上一文章:半自动泊车系统实验室仿真测试
・下一文章:大众蔚领、宝来氙气大灯切换远近光出现抖动
摘要:本文针对改善车辆制动效能和各工况下车辆稳定性的问题。基于传统车辆的液压制动系统,在给出控制技术的基本原理和控制基础上,指出保障车辆安全的ABS/EBD/DYC/ESP技术对车辆性能的作用,受到较多因素影响。给出控制框架,总结各控制技术控制策略,归纳控制内容和关键技术,有利于梳理思路和研究重点及完善集成控制技术。目前控制策略的研究大都针对制定工况,研究ABS/EBD/DYC/ESP对工况适应性和对干扰鲁棒性以及它们间的协调控制,可通过控制参变量实时调整或集成技术来实现。
车辆安全行驶受到许多因素影响。其中,车辆的制动系性能起着首要作用。目前,与制动系相关的安全技术主要有制动防抱死系统ABS (anti-lock braking system)、电子制动力分配系统EBD (electronic brake-force distribution)、直接横摆力矩控制系统DYC (direct yaw moment control)及车辆电子稳定系统ESP (electronic stability program)等。它们大大改善了车辆纵向制动效能或横向稳定性。为突出研究重点,梳理研究思路,本文在说明基本工作原理和研究基础上,对控制策略及关键技术总结说明,给出控制框架。
1 基本原理
ABS的作用是防止制动时车轮抱死,它是通过判断车轮状态,对车轮的制动器制动力调节而实现的;EBD是在ABS硬件基础上,考虑制动时载荷的前移,为了充分利用地面制动力,防止后轮先于前轮抱死,是ABS程序的升级;DYC是在ABS硬件基础上,加装判断车辆稳定状况的传感器,通过判断车辆稳定状况,对某些车轮主动施加制动力而产生所需附加横摆力矩而实现车辆的横向稳定;ESP是综合了ABS、TCS、DYC,通过CAN总线对车辆在转弯、驱动或制动时转向特性需要纠正,以及极限失稳工况下对车辆横向稳定控制。ABS主要适用于车辆紧急制动,满足一定条件时起作用;EBD主要适用轻制动或ABS起作用前,先于ABS ;DYC/ESP是在车辆横向不稳定时,其优先于ABS/EBD。
2 控制技术
2.1控制基础
2.1.1轮胎模型
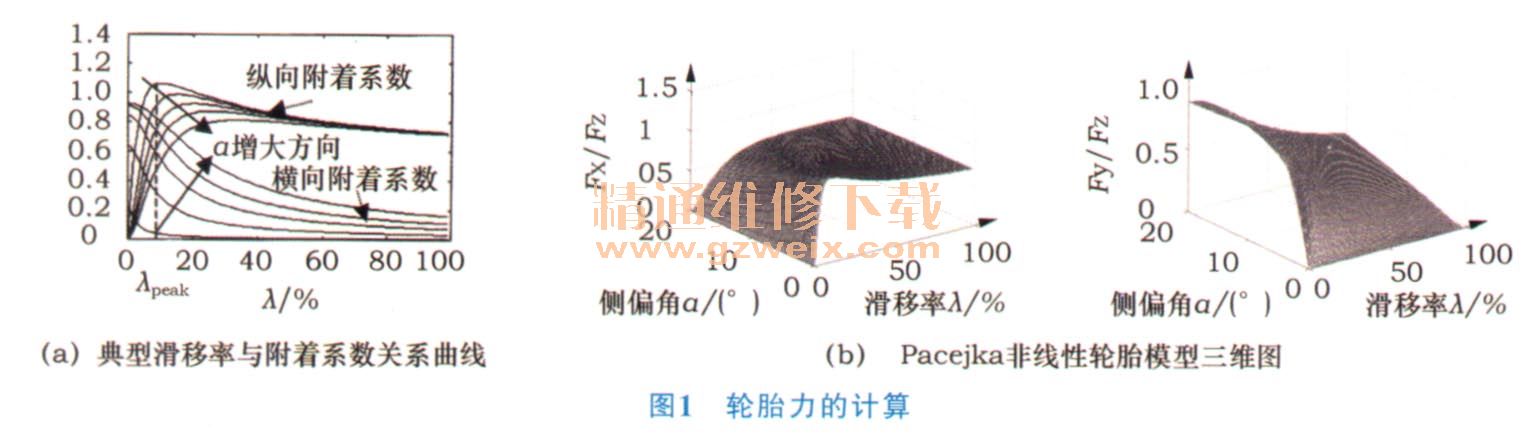
无论是制动时ABS/EBD对车轮被动施加制动力或无制动时DYC/ESP主动产生制动力,实质都是对地面纵向制动力和侧向力的控制。地面与轮胎间力的大小和方向受车轮结构及运动状态、地面状况及载荷等影响,轮胎力可采用轮胎模型计算,轮胎模型的类型较多,可根据研究目的选择,常用的半经验轮胎模型已集成于A DAMS、Carsim、veDYNA等车辆模型软件中。从轮胎模型表达式来看,轮胎力可根据模型输入(滑移率λ、侧偏角。等)先计算出附着系数u,再与轮胎载荷相乘间接计算出,或根据模型输入(滑移率λ、侧偏角a或载荷FZ等)直接计算,如图1所示。
2.1.2车辆模型
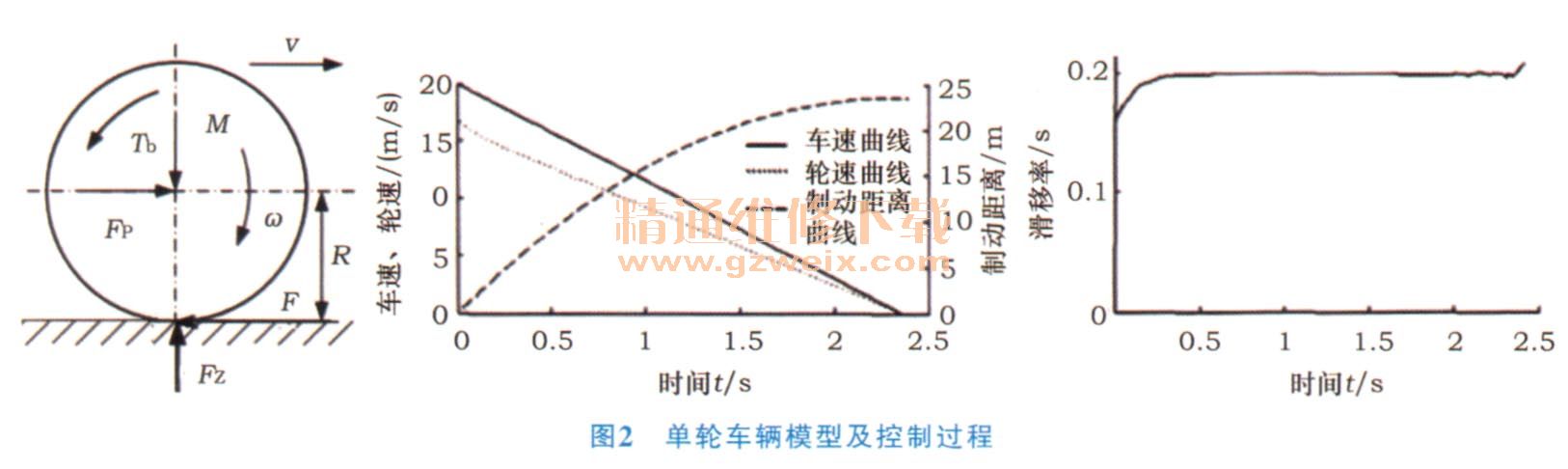
在开发ABS/EBD/DYC/ESP控制技术时,需根据研究目标建立相应的车辆模型。用于建立车辆模型的软件较多,但为了反映与分析各变量间关系,需建立基于车辆动力学的Simulink车辆模型。用于ABS控制技术的1/4车辆模型(即车轮模型)及控制过程如图2所示,图中符号含义及动力学方程参见文献。
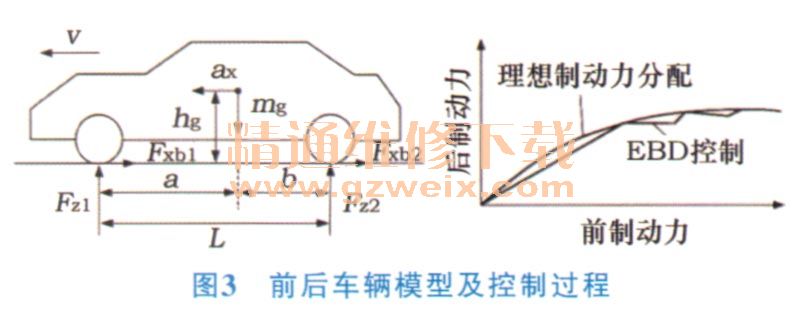
用于EBD控制技术的1/2车辆模型(前后模型)及控制过程如图3所示,图中符号含义及动力学方程参见文献。
用于车辆稳定性的ABS/EBD/DYC/ESP整车控制技术的八自由度(4个车轮转动、车身横摆、侧倾、横向及纵向运动)四轮车辆模型,以及用于判断车辆稳定的线性。自由度参考模型如图4所示,图中符号含义及动力学方程参见文献。

")
")
")
")

