逆变器是一种把直流电转换成交流电或反之亦然的装置,为了使直流逆变产生交流,需要将4个不同的开关(图14),从S1到S4,按如下方式组合,改变开关的H/关时间可姗目应的改变频率。

驱动电动机需要产生正弦交流电压,产生正弦波形交流而不是矩形波形交流则需要持续改变电压以产生正弦波。如图15所示,当检测到所需输出电压(vi)持续极短的一段时间时(Ts)。通过控制“Ton" (Ton,开关ON时间)时间,使“Vi xTs”的面积和"Vd x Ton"(电源电压x开关ON时间)的面积相同,则有效电压即变为vi。通过此方式控制逆变器电路中IGB丁的通断时间,使产生的电压持续改变,从而模拟产生出正弦交流电压。这种控制方式的全称是Pulse Width Modulation(即:PWM脉冲宽度调制),它是用脉冲宽度按正弦规律变化和正弦波等效的PWM波形控制逆变器电路中IGBT的通断时间,使其输出的脉冲电压的面积与所希望输出的正弦波在相应区间内的面积相等,从而达到驱动电动机所需的交流输出电压。动力管理控制
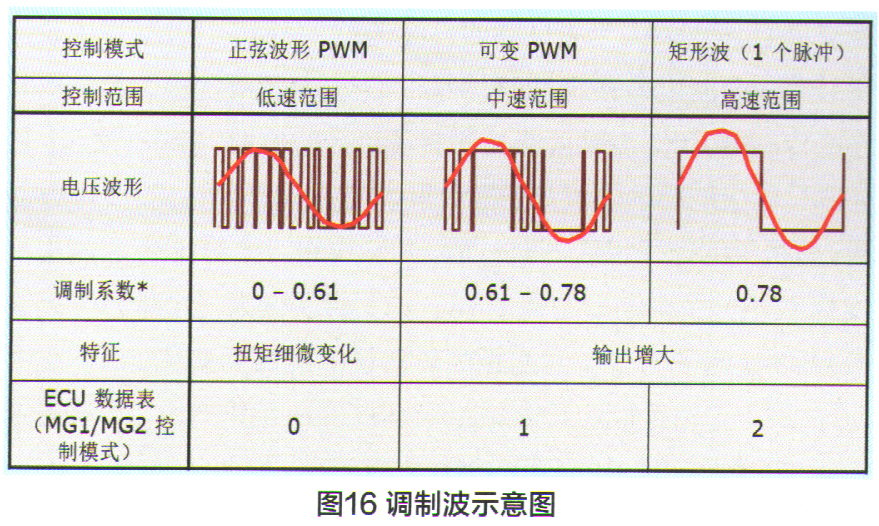
ECU(HV CPU)根据车辆的工作条件,通过改变调制波(图16)的频率和幅值则可调节逆变器电路输出电压的频率和幅值,以有效控制MG1和MG2,由此,确保最大效率的控制不同工况下电动机的扭矩和转速。简而言之,它是通过改变输出方波的占空比来改变等效的输出电压,为了让电动机获得更大的扭矩输出,正弦波形的三相交流的振幅(电流)应该增加,为了使电动机的速度增加,正弦波形三相交流的频率应该增加(图17)。
调制波可分为3种:正弦波PWM、可变PWM和矩形波(1个脉冲)。正弦波PWM是最常用的电压波形,电压和电流成正弦波,转矩变化小,可以获得较为平滑的输出,多用于电动机的低速范围。与其他控制方式比较,其缺点是电动机的输出电压较低。矩形波理论上可以产生最大的基本波分量,调制率固定,电压振幅不可变,多用于电动机的高速范围。可变PWM的调制率处于两者之间,能够有效的提高电动机中速范围内的功率(图18)。
关键词:



")
")
")
")

