・上一文章:如何避免农业机械的盲目购置与使用故障
・下一文章:别克新君威轿车空调制冷故障诊断与排除
3 控制层
控制层针对无人车进行横向控制、纵向控制,而且横向控制是控制无人车的行驶方向,纵向控制是控制无人车的速度。控制层接收来自决策层所作出的局部和全局路径规划轨迹,然后控制相应的执行机构作出动作,完成对路径轨迹的跟踪。图2为控制层体系结构图。
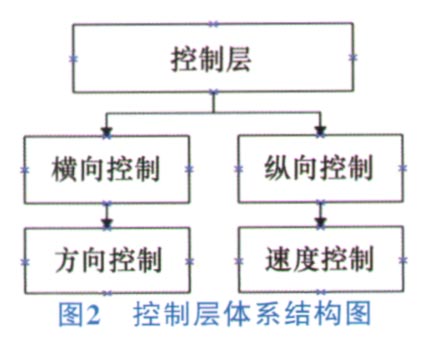
1)横向控制横向控制本质上属于无人车的转向控制,它的控制目标为在保证无人车行驶安全性和乘坐舒适性的前提下,使无人车能够准确地对预期的路径进行跟踪。常用方法有基于模型预测控制(MPC)控制器、PID横向控制器、基于模糊逻辑横向控制器等。
2)纵向控制纵向控制就是控制无人车行进中的速度,而且横向控制的精度也会受到速度控制的影响。车辆的速度涉及到油门和制动,通常是设计油门控制器和制动控制器来控制无人车速度。常用的方法也同横向控制,有基于滑模控制的纵向控制器、模糊PID控制器、模糊控制器等。
4 结束语
汽车智能化是未来的重要发展方向,无人驾驶汽车则是智能汽车的最终形态。感知层、决策层、控制层作为无人驾驶汽车的三大组成部分,通过感知层提供环境、位置等信息,决策层根据这些信息作出路径规划,最后控制层进行横向和纵向控制完成路径跟踪,实现无人车的自动驾驶。





