・上一文章:汽车稳定性分析及控制策略研究
・下一文章:汽车内饰件收纳盒的模具创新优化设计
摘要:分布式电驱动车辆各驱动轮牵引力可独立分配且互不影响,具有传动链短、动力响应快和能量传递效率高等优点,调节各车轮转矩的分配,可提高车辆的动力性。但是当车辆行驶至对开路面或者对接路面时,左右、前后驱动轮转矩不同会造成车辆的稳定性变差。如何协同4个电机转矩工作,保证在不同路况下的稳定性和动力性成为本文研究的重点。
分布式电驱动车辆,采用多个轮毂电机,并按分布式结构安装在车辆的各个部位,每个轮毂电机独立驱动,这样牵弓1力可独立分配且互不影响。整车的控制结构分为上下2层,上层控制器负责策略控制,控制整车的行驶方向和姿态,下层控制器控制4个车轮转矩的实时分配。
转矩分配遵循最优滑移率、电机转矩最大限制、路面所能提供
的最大驱动力限制和期望横摆角速度为零等原则。其中,最优滑移率控制,由滑移率控制器直接根据设定最优滑移率与实时滑移率差值输出调整力矩Tslip,下层控制器作为集成控制器,根据需要实时调整驱动转矩,期望横摆角速度为零控制,即为将轮胎侧向力和纵向力联合产生的横摆力矩经过方程求解Myaw,然后去调整左右车轮的驱动力矩。特殊路面指低附着路面和对开路面。其中,低附着路面指车轮摩擦系数低的路面,如雪地、冰面等;对开路面指左右侧车轮摩擦系数差异较大的路面,如一边沥青一边冰的路面。
1 滑移率估计控制
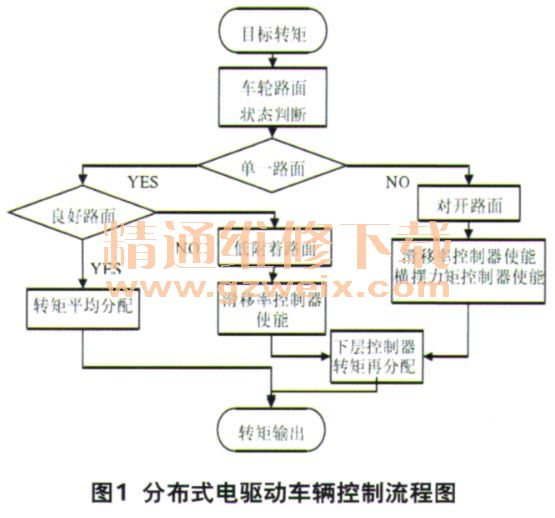
当车辆从高附着路面进入低附着路面时,车轮会发生滑转,驶入对开路面时,还会造成车辆侧偏。所以要研究分布式电驱动车辆加速进入特殊路面时的驱动转矩分配控制策略,其控制算法须先根据滑移率估计模块做出一级判断,即滑移率估计,目的是确定驶入的是低附着路面还是对开路面,然后进入相应的转矩分配模式。其控制流程图如图1所示。
2 从高附着路面行驶到低附着系数路面时的控制
如果车轮进入低附着路面时没有滑转,则按照平均分配模式分配转矩。如果发生了滑转,则进行最优滑移率控制模式。控制方法一,4轮最优滑移率独立控制,当2个前轮进入低附着路面产生滑转,左前和右前轮滑移率控制器迅速做出调整前轮输出转矩的命令,从而控制前轮的滑移率在最优范围内,后轮的控制原理与前轮一致;方法二,前后轮分别进入低附着路面的时间差关联控制,当前轮滑移率估计模块检测超过最优滑移率时,即做出调整输出转矩的命令,同时后轮滑移率控制器估算后轮进入低附着路面的时间△t,当△t时间到达后,后轮滑移率控制器直接根据前轮的实时工况、驱动力矩及垂向载荷比调整后轮驱动力矩。
3 从高附着路面行驶到对开路面时的控制
当车辆从高附着路面行驶到对开路面时,如果单侧前轮没有滑转,则按照平均分配模式分配转矩。如果发生滑转,则进行最优滑移率控制模式。控制方法一,左前轮进入路面时若滑转,则左前轮滑移率控制器起作用,并迅速做出调整左前轮输出转矩的命令,控制其滑移率在最优滑移率范围内,同时,本着同轴转矩尽量相同的原则,左前轮滑移率控制器将调整力矩赋值给右前轮转矩控制器,实现同轴锁定,后轮的控制方式与前轮一致;方法二,考虑到左前和左后轮进入到低附着路面有一定的时间差,在左前轮滑移率估计模块检测到滑移率超过最优滑移率时,左前轮滑移率控制器做出调整输出转矩的命令,同时,左前轮滑移率控制器估算后轮进入低附着路面的时间差△t,当△t时间到达后,左后轮滑移率控制器及右后轮滑移率控制器直接根据左前轮实时调整驱动力矩,以及垂向载荷比调整后轮驱动力矩,实现前后轴关联控制。
")
")
")
")
")
