・上一文章:2012年宝马X6蓄电池
・下一文章:剖析2019年凯迪拉克CT6 10L80自动变速器新技术(二)
三、混合动力制动系统主要功能
1.分布式功能
SBA控制单元是混合动力制动系统的主控控制单元。它控制从探测制动要求直至控制制动系统执行机构的所有过程。能量回收式制动的执行机构是传动系统:通过供电电控箱控制电动机使其以发电机方式工作。为了使其能够产生电能,必须以机械方式对其进行驱动。因此电动机吸收作用在传动系统上的制动力矩。在减速度最高3m/S2的情况下,如果制动力矩仅作用在后桥上就会导致不稳定的行驶情况出现。因此进行能量回收式制动时,分动器内的片式离合器也会接合。随后,前桥和后桥达到相同转速从而为制动力矩在两个车桥上的平均分配创造前提条件。在这种 “电子伺服模式”下会尽可能地回收利用制动能量,即通过第一个电动途径输送。只有在减速度高于3m/s2或混合动力驱动装置无法转化所有制动能量时,才会针对剩余能量使用传统行车制动器。为此,SBA控制单元控制主动式制动助力器。后者产生用于两个制动回路的制动压力,制动压力通过动态稳定控制系统发布到四个车轮制动器上(图5)。

只有在故障情况或特殊情况下才会提供应急功能,此时SBA控制单元不再执行主控功能。例如在不稳定的行驶情况下,动态稳定控制系统就会执行主控功能,从而以高优先级使车辆稳定下来。此时无法继续进行能量回收式制动。
能量回收式制动所需的某一组件失灵或供电失灵时,混合动力制动系统就会由“电子伺服模式”切换为传统模式。在传统模式下会使制动踏板与行车制动器重新建立起机械连接。这样可使车辆通过传统液压制动系统实现可靠减速。
2.电子伺服模式
混合动力制动系统在接通供电后对电子伺服模式正常工作所需的所有系统组件进行自检。顺利结束自检后就会启用电子伺服模式。否则,混合动力制动系统就会保持传统模式。
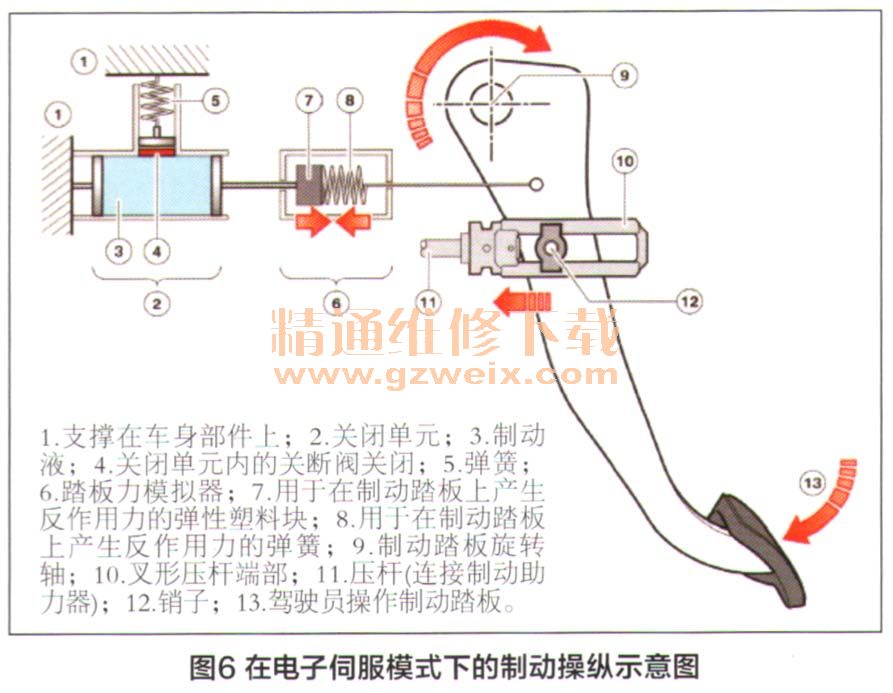
在电子伺服模式下(图6),制动踏板与制动助力器的机械连接断开。SBA控制单元通过制动踏板角度传感器分析出驾驶员的制动要求。根据行驶情况和混合动力组件状态将制动要求划分为能量回收和液压部分。
SBA控制单元为此向混合动力主控控制单元发送一个规定值用于实现能量回收。混合动力主控控制单元随即通过混合动力电动机控制装置控制单元执行该规定值。
由电动机通过这种方式产生的电能存储在高电压蓄电池内。在此也需要供电电控箱控制单元的参与(改变电压和电流强度)。
为了实现液压部分,SBA控制单元为主动式制动助力器内的电磁阀供电。这样可使空气流入工作室内并通过真空压力在制动主缸内的活塞上产生作用力。从而将压杆拉入制动助力器内。这样,插入压杆叉形端部的制动踏板销也不会碰到机械限位位置。因此不会在操作制动踏板时产生反作用力。
但是踏板力模拟器会产生反作用力。所实现的作用力传递与传统制动系统基本相同。在电子伺服模式下,关闭单元的作用就像一个刚性元件。密闭其中的制动液无法被压缩。在这种状态下,制动液也无法溢出到带有弹簧的膨胀室内,因为膨胀室被一个电磁阀封住。
")
")
")
")
")
