0 引言
纯电动方程式赛车的结构与燃油车主要区别,就在于从发动机驱动变为电动机驱动,由电池组来提供能量。车辆的驱动系统和
转向系统是赛车中的关键部分,对车辆行驶的动力性、稳定性和机动性至关重要。本项目开发的电动方程式赛车
是以车载电源为动力,用两后轮独立电机驱动车轮行驶,两前轮转向为主,两后轮转向为辅的方式。本论文主要介绍深职魅影车队参赛作品
轮毂电机驱动
电动汽车的电气系统。该电气系统能实现以下功能和技术指标。
(1)
轮毂电机独立驱动转向控制。实现车速PID精确控制、电子差速、转向精确控制和
轮毂电机保护等功能。
(2)显示报警功能。实现LCD实时显示系统,能将车况实时的提供给司机,并利用蜂鸣器的报警方式进行报警提示。
(3)照明与信号功能。可实现在车及手机遥控照明与报警信号。
(4)倒车雷达功能。实现倒车时对障碍物距离的探测并分等级报警。
(5)电池管理功能。对电池组的电压、输出电流和温度信号进行实时采集,主控单元会根据软件设置的情况进行电池组管理和保护等措施。
车身电气系统主要由仪表、照明、雷达、四轮转向驱动和电池管理模块组成。控制单元采用集中控制方式,4个
轮毂电机和4个转向电机的采集信号和控制信号都和主控芯片直接电气连接,实现四轮全方位转向和四轮驱动控制,能进行电子差速和电子转向角度差等。
同时,
轮毂电机和转向电机还与控制台的控制信号和显示信号进行直接电气连接,实现方向机的准确采样和模式开关输入,并将车况信息实时的显示出来。另外,对电池组电压、输出电流和温度信号线连接,实现对电池组的实时监控和保护。
总结起来,车身电气系统的硬件设计包括以下了个方面:仪表系统模块;照明与信号模块;无线通信模块;雷达通信模块;四个
轮毂电机驱动转向控制模块;电池管理模块(图1)。
1.2仪表系统介绍
整车控制器是整车的核心控制部件,负责采集加速踏板、制动踏板和转速等信息。整车控制器通过CAN总线通讯网络实时协调各个
ECU之间的控制策略,使整车满足各种车况的要求。整车控制还需要负责仪表显示的功能。
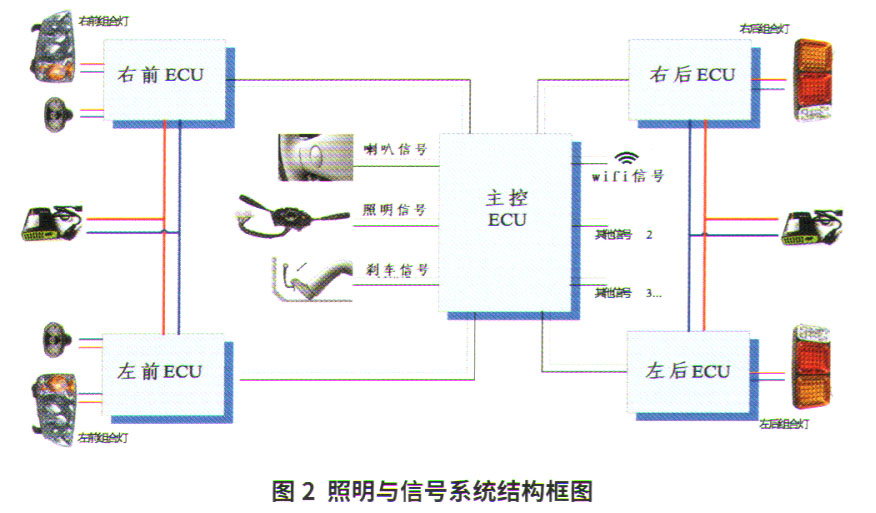
1.3照明与信号系统介绍
照明与信号系统的4个组合灯控制
ECU与主控
ECU通过CAN总线进行通信。主控
ECU还配置了WiFi通信模块,可用手机连接局域网向主控
ECU发送命令,从而对照明与信号系统实现远程控制。WiFi通信模块采用的是ESP8266,可作为热点,实现局域网无线控制。照明与信号系统主控
ECU与组合灯控制
ECU与如图2所示。
1.4总线通讯网络
轮毂电机驱动
电动汽车的整车控制系统,共有7个电子控制单元,分别是整车控制器、左后轮驱动控制器、右后轮驱动控制器、仪表控制器、雷达通信控制器、照明与信号控制器和电池管理控制器。它们之间通过CAN总线网络架构实现数据通讯,实现线控。
[1] [2] 下一页
关键词:

")
")
")
")
")
