・上一文章:农用轻卡转向系统常见故障排除
・下一文章:雪铁龙爱丽舍遥控器匹配
摘要:本论文通过对育苗移栽机械输送系统结构的初步研究分析设计,确定了由输送花盆的输送系统和自动送苗系统两部分组成的输送系统,为穴盘苗移栽机械手的总体结构设计、机械手的进一步研制和开发提供理论依据。
0 引言
育苗移栽可缩短农作物在田间的生长时间,大幅度提高土地的复种指数,进而提高经济效益。为了适应生产发展需要,穴盘苗移栽要采用自动化输送系统。本文介绍的移栽机械的输送系统由两部分组成,一是输送花盆的输送系统;二是自动送苗系统。系统要保证在高效率移栽的前提下提高穴盘苗移栽的自动化程度,由于输送穴盘苗时不要求精确的传动比和较高的传动效率,自动供苗可以采用普通平带输送。
1 执行元件的选择
输送装置驱动方式采用电气执行元件即电机来完成控制。电气执行元件的特点是:可使用商业电源;信号与动力的传送方向相同;有交直流之别,应根据不同情况进行选择。其优点是操作简便,编程容易,能实现定位伺服,响应易于CPU相接;体积小,动力较大;无污染,瞬时输出功率大;缺点是过载差,由于某种原因卡住时,会引起烧毁事故,易受外部噪声影响等。
电气执行元件包括控制用电机(DC、AC伺服电机、步进电机)、静电电机、磁致伸缩器件、压电元件、超声波电机以及电磁铁等。该移栽机械手的输送装置,采用直流电机。
2 输送带设计
带传动是由两个带轮和一根紧绕在两轮上的传动带组成,靠带与带轮接触面之间的摩擦力来传递运动和动力的一种挠性摩擦传动。
如图1所示,带传动一般是由主动轮、从动轮、紧套在两轮上的传动带及机架组成。当原动机驱动主动带轮转动时,由于带与带轮之间摩擦力的作用,使从动带轮一起转动,从而实现动力传递。
常用的带传动有普通平带传动和同步带传动。
带传动的特点:带传动属于挠性传动,传动平稳,噪声小,可缓冲吸振。过载时,带会在带轮上打滑,而起到保护其他传动件免受损坏的作用。带传动允许较大的中心距,结构简单,制造、安装和维护较方便,且成本低廉。但由于带与带轮之间存在滑动,传动比不能严格保持不变。带传动的传动效率较低,带的寿命一般较短,不宜在易燃易爆场合下工作。
3 花盆输送系统
本文所设计的花盆输送系统可实现以下功能:将花盆依次输送到指定位置后停止运转。
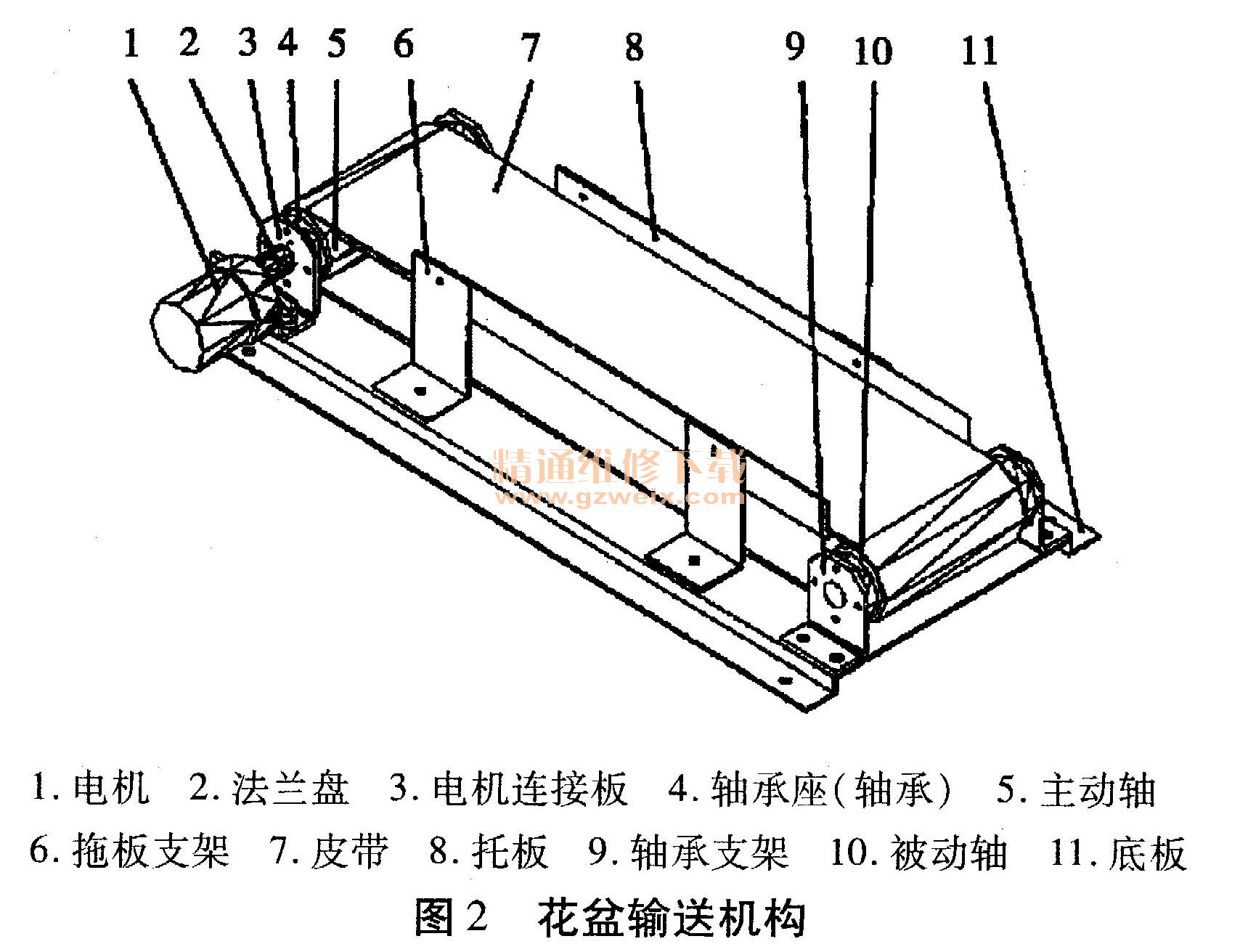
由于输送花盆时不要求精确的传动比和较高的传动效率,因此花盆输送可以采用普通平带输送,驱动电机选用直流伺服电机。整个装置的机械结构参见图2。其中托板8是保证花盆在皮带7上平稳可靠地输送;法兰盘2的作用是轴向连接皮带主动轴5与电机1,即使设计或安装时二者轴向不同心,皮带轴也能平稳转动;底板11的作用是使整个装置独立、紧凑,便于安装、调整。另外,需要在机械手夹持装置送苗的位置附近安装一个检测传感器。该输送装置的主要工作过程:花盆被依次放置于皮带上,电机转动,花盆随皮带运动,检测传感器同时进行检测;当传感器检测到花盆时,电机停止转动,此时花盆恰好位于指定位置,等待机械手夹持装置送苗;花盆苗落入花盆后,电机继续转动,输送下一个花盆至指定位置。
4 穴盘苗输送系统
本文所设一计的穴盘苗输送系统可实现以下功能:将穴盘苗依次输送到指定位置后停止运转:
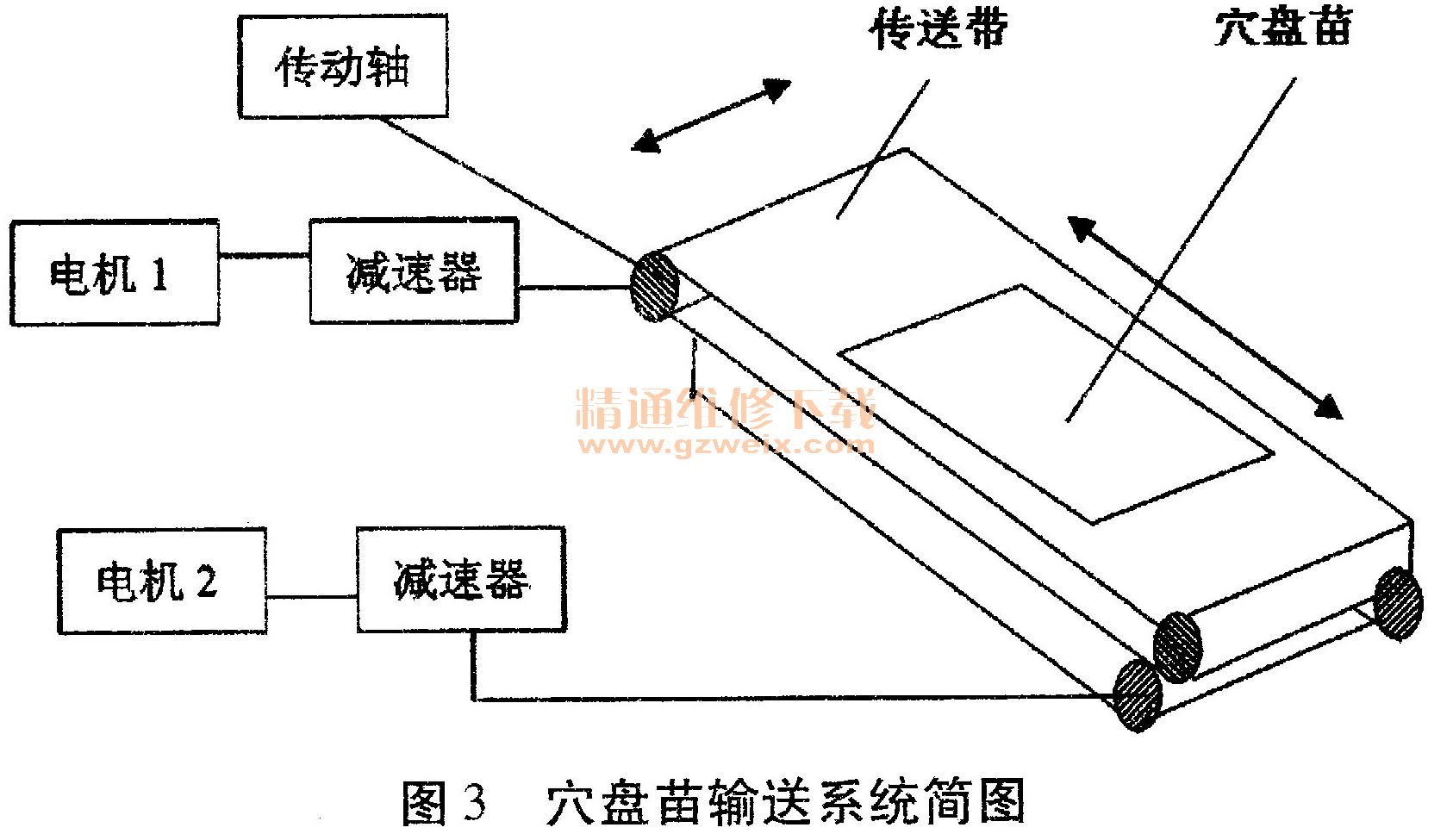
由于输送穴盘苗时要求比较高的传动精度和较高的传动效率,因此,穴盘苗输送可采用同步带输送,驱动电机选用直流伺服电机。整个装置由两个电机控制穴盘两个方向的运动,机械结构参见图3:另外,需要在机械手夹持装置送苗的位置附近安装一个检测传感器。该装置的工作过程:穴盘被依次放置于皮带上,电机转动,穴盘苗随皮带运动,检测传感器同时进行检测。当传感器检测到穴盘苗时,电机停止,此时穴盘苗恰好位于指定位置,等待机械手夹持装置送苗;穴盘苗落入穴盘后,电机继续转动,输送下一个穴盘苗至指定位置。
5 传动机构的设计
传动机构实质上是执行元件与执行机构之间的机械接口,对运动和力进行变换和传递,执行元件以输出旋转运动和扭矩为主。本设计执行机构为输送带,执行元件和输送带连接的机构可以有多种结构形式,当电机转速比较低时,可将电动机与同步带轮通过联轴器直接连接,其优点是结构简单,可获得较高的速度,但对电动机的负载能力要求较高。此外,如果电动机的转速比较高,可通过减速器即齿轮传动来带动输送带的主动轮。
6 结束语
本论文对育苗移栽机械的输送系统结构做了初步研究与设计分析,为穴盘苗移栽机械手的总体结构设计,机械手的进一步研制和开发提供理论依据。





