・上一文章:一种基于PLC控制技术的穴盘播种装置的设计
・下一文章:2BM-6型花生免耕施肥穴播机的研制
摘要:研发了一种全自动可避障蜜桃采摘机,该装置包括机械系统、动力系统和视觉识别系统。机械系统由六轮虾形可避障底盘、六自由度机械臂和防蜜桃损伤机械手构成。动力系统包括电动机汽缸和皮带等动力机构构成。视觉识别系统包括光学相机、红外热像仪和双目式摄像头构成。机器依靠其特殊的六轮虾形可避障底盘可以在崎岖的地形进行工作。通过机械臂与机械手的相互协调配合,其特有的视觉识别系统可以完全代替人类对蜜桃实现全自动采摘,大大节省了劳动力,其本身具有良好的创新性和发展性。
0 引言
在果蔬生产作业中,收获采摘约占整个作业量的40%。采摘作业质量的好坏直接影响到果蔬的储存、加工和销售,从而最终影响市场价格和经济效益。国内的采摘机器人的起步较晚,与国外发达国家的水平还有一定的差距,需我们学习国外先进的设计思想与技术,创造出适合于我国发展的果蔬采摘机械。
蜜桃的主要经济栽培区在华东华北各省市,较为集中的地区有山东蒙阴、肥城、青岛、河南开封、商水、河北遵化、深县等。这些地区的地形多以低缓的丘陵,起伏的山岭为主,为桃树的生长提供了有利的地形条件,同时,也为蜜桃成熟时的采摘带来了极大的不便。
目前,蜜桃的采摘大多以人工采摘为主,而且蜜桃的成熟期很短,在成熟时如果不能及时采摘,容易导致其掉落、腐烂,造成果农的经济损失,所以在采摘时劳动强度大,但效率不高。现在市场上还没有完全可以克服崎岖地形、可越障、自动采摘蜜桃的机器。为了提高果农的经济效益、降低果农的劳动强度与生产成本,研发高效、安全、经济实用的多功能山地果园机械对我国的农林产业结构调整具有重大意义。
1 整体结构及其工作原理
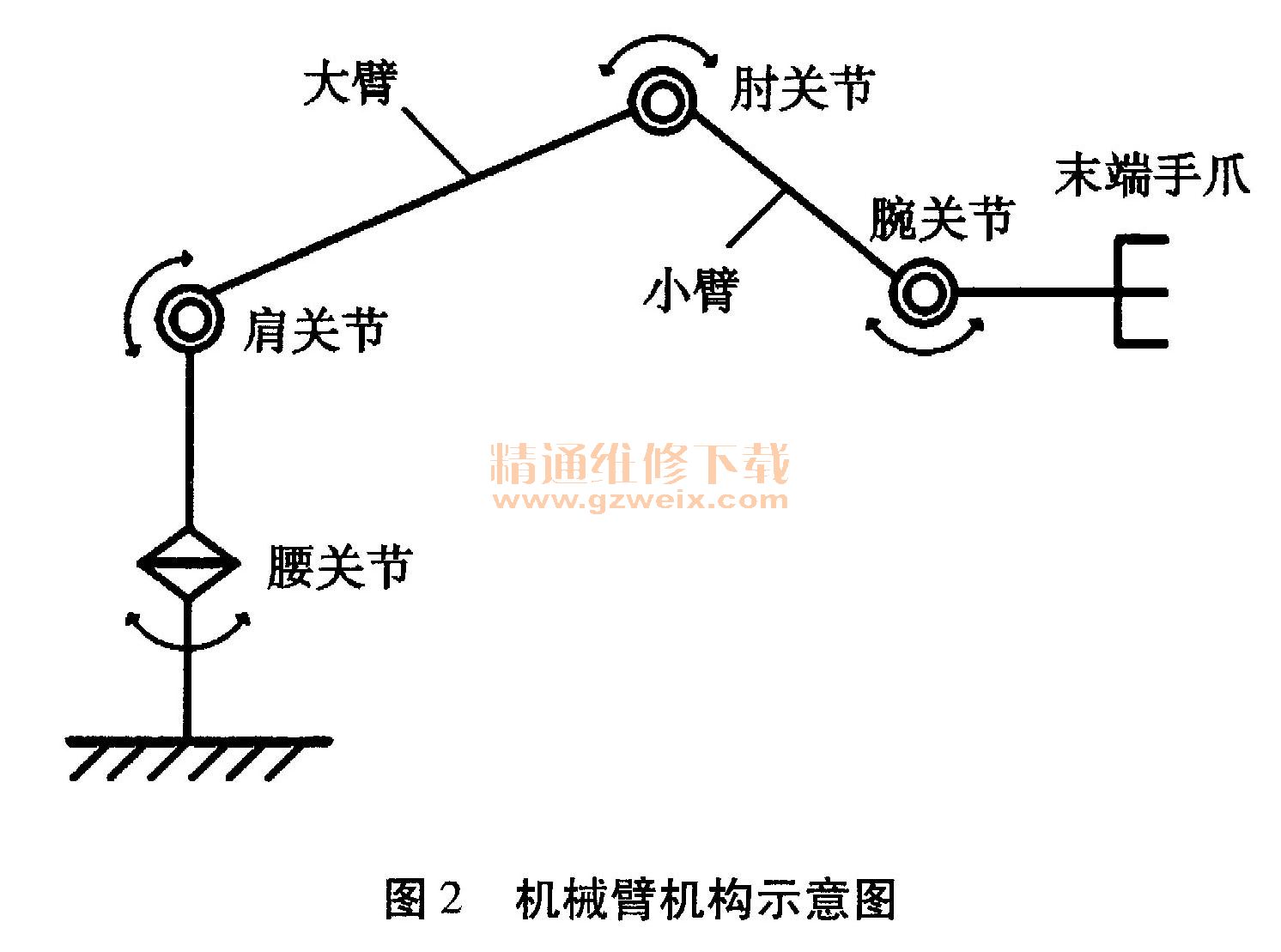
一种全自动可避障蜜桃采摘机的整体结构包括六轮虾形底盘部分、六自由度机械臂部分、采摘机械手部分、视觉识别部分、动力传输部分。其中,六轮虾形底盘部分主要包括头部、主体、侧身、尾部四部分,其车轮采用防爆蜂窝轮胎。机械臂腰关节通过皮带与固定在底盘上的电机实现转动,大臂、小臂都是由型材截断制成,肩关节和肘关节通过铰接件连接,由电机控制转向。机械手是由平移机构、旋转机构和夹取机构组成,通过舵机与机械臂连接。双目摄像头安装在小臂上,模拟人的双眼,采集蜜桃果实的数据传回小型PC处理器。
1.1采集图像
整台机器共有三台光学相机、一台红外热像仪和一台双目式摄像机,各图像采集机器之间分工明确。底盘前的两台光学相机和红外热像仪用于采集机器人工作时前方及两侧的环境图像;尾部上侧的光学相机用于采集机器人后方的环境图像;采摘机械手后部的双目式摄像头用于采集并识别桃树上蜜桃及准确位置图像。
1.2自动避障
当光学相机以及红外摄像仪将采集好的图像数据传回到处理器,处理器自动对图像中的障碍进行分析识别,形成脉冲信号反馈,通过对六个车轮的控制,使他们之间相互配合,实现自动避障。
1.3摘取蜜桃
当双目式摄像头将采集好的图像数据传回到处理器,处理器根据图像中颜色的不同,识别出蜜桃并确定蜜桃所处的空间位置,处理器将形成脉冲信号反馈到机械臂伺服电机上,使它们调整各自的位置;并对机械手的旋转机构和平移机构进行微调,使其到达蜜桃所在的位置;最后通过舵机对机械手控制,将蜜桃目标成功从树上采摘下。
1.4运送果实
将采摘下的蜜桃放到底盘上装载的桃箱中,机器人与桃箱下底面接触的位置安装了重量传感器,当蜜桃及桃箱的总重量达到机器人设置的预算重量时,机器人停止采摘,会把采摘的蜜桃按原路运回到最开始设计的收集地点。
2 创新点
(1)采用六轮虾形可避障底盘,通过底盘前部的两台光学相机和一台红外热像仪对机器人运行工作时的地形进行识别成像传输到PC处理器,处理器对图像进行处理,形成信号反馈,对车轮进行控制,及时完成避障。
(2)机器的底盘部分采用八台伺服电机进行驱动,机械臂部分采用三台伺服电机进行驱动,各伺服电机之间相互协调配合,使得整个机器更加灵活。
(3)采用大密度的蜂窝轮,防止轮胎在地形崎岖的地方工作时产生扎带、爆胎等现象,阻碍机器的正常运行;底盘的头部、尾部都安装缓冲机构,使得机器运行工作时更加平稳。
(4)机械手夹取机构由三根排列均匀的机械手指组成,每根机械手指腹部都附着橡胶层,以减少对蜜桃的损伤。机械手的滑移机构以及旋转机构,可以使机械手在小空间内移动、旋转,对果实进行准确地采摘。
(5)机械手后部安装的双目式摄像头,其视觉范围与人眼视觉范围相同,可代替人工操作,实现全自动采摘。
3 总结
本设一计基于桃树种植地区的崎岖复杂地形,蜜桃的颜色识别,通过创新性设计,实现了可避障、全自动采摘及运输等功能。该机器人可代替人类来对蜜桃进行采摘,具有较强的环境适应能力。通过这台机器人,果农只需将蜜桃装车即可,减轻了他们劳动负担。总之,该机器具有很好发展情景,一定会成为果农的好帮手。





