・上一文章:剖析捷豹F-PACE新技术亮点(一)
・下一文章:立式纱缸染色机应力集中情况研究
1.3模内取料装置设计
模内取料装置(2)(如图1、图3、图4所示)包括:取料手掌盘(21)、倒挂曲臂(22)手掌盘悬臂(23)、取料平移滑块(24)、取料平移道轨(25)、取料支撑架(26)、取料升降滑块(27)、取料升降道轨(28)、取料平移驱动装置(29)和取料升降驱动装置(30)。

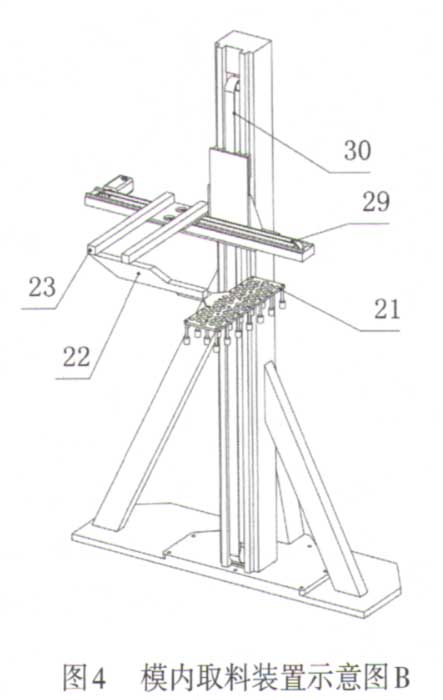
取料平移驱动装置(29)和取料升降驱动装置(30)与控制器电连接。取料平移驱动装置驱动取料手掌盘沿取料平移道轨(25)前后移动,取料升降驱动装置驱动取料手掌盘沿取料升降道轨(28)升降运动。
1.4接料叠堆装置设计
接料叠堆装置可完成塑料容器(如杯子、盖子或碗等)的整排叠堆,解决传统制杯机叠堆整排塑料容器及人工计数难题;同时也为将叠堆后的塑料容器卸料到下一工序作准备。
接料叠堆装置(3)位于模内取料装置(2)之下。
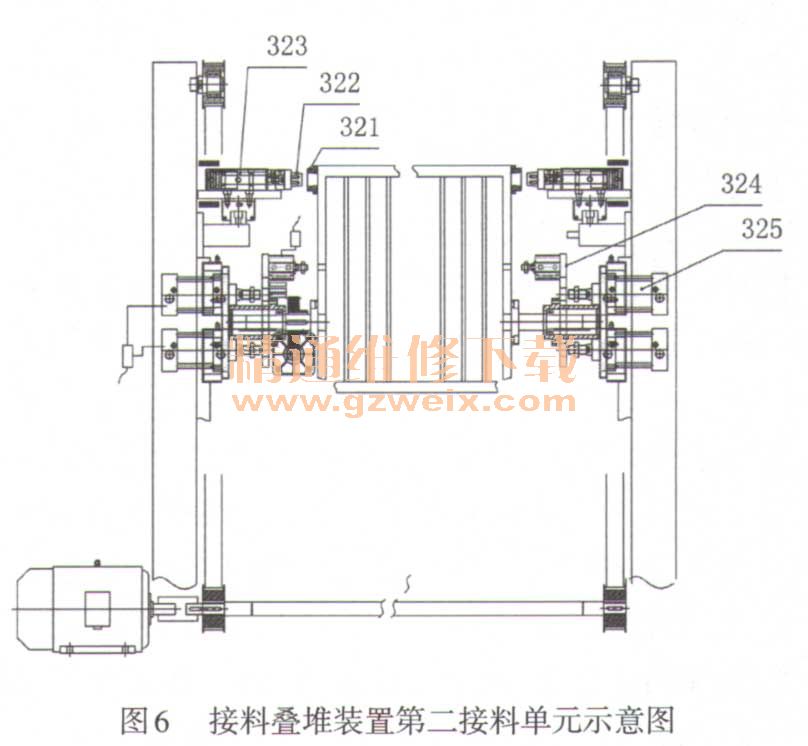
接料叠堆装置(3)(如图1、图5、图6所示)包括:第一接料单元、第二接料单元。
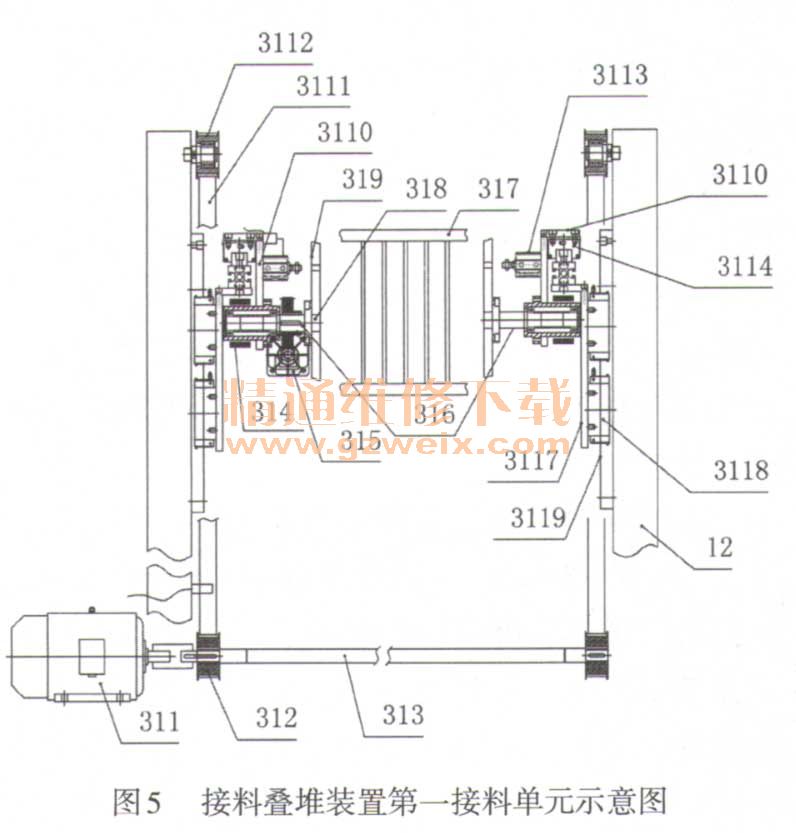
接料叠堆装置的第一接料单元(如图5所示)设置有第一接料箱(317)、第一接料平移支撑架、第一接料平移驱动装置、第一接料升降驱动装置和第一旋转驱动装置。
第一接料箱设置有杯料叠堆通道。第一接料平移驱动装置、第一接料升降驱动装置和第一旋转驱动装置分别与控制器电连接;第一接料平移驱动装置驱动第一接料箱沿着第一接料平移支撑架移动;第一接料升降驱动装置驱动第一接料平移支撑架移动沿着升降立柱(12)升降;第一旋转驱动装置驱动第一接料箱旋转。
第一接料单元的工作原理及过程:第一接料箱(317)在待机工位待机接到控制器接料指令后即可按序由第一升降驱动装置驱动上升至升降骚站,后再由平移驱动装置驱动滑行至接料工位完成接料数量后,在平移驱动装置的驱动下由平移滑行连接座(3110)带动后退滑行至升降释站,由升降驱动装置驱动下降至下降骚站点和旋转中心点,在下降到位的同时,防摆离合电磁阀控制防摆气缸(3113)动作拔出销钉。随后旋转电磁阀控制旋转气缸(315)带动齿条、旋转齿轮把第一接料箱的接料口对准传送装置(5),然后防摆气缸动作把销钉插在卸料防摆孔上,随后卸料装置(4)按序完成动作,卸料后,控制器即指令升降伺服电机(311)驱动升降连接固定座((3117)带动第一平移滑行装置、第一驱动旋转装置及第一接料箱的上升或下降完成各排的卸料动作。





