・上一文章:废旧手机电池激活后再利用
・下一文章:基于嵌入式Windows CE下串行通信的实现
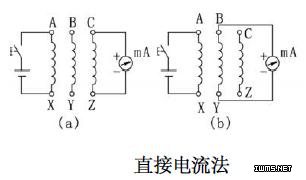
3、直接电流法
将低压直流电源或干电池串联一只按钮开关接到其中一相,万用表置于最小毫安档或电压档,接于另一相,如上图所示。当接触按钮的瞬间,表头指针应向大于0的方向摆动,否则,应调整表笔使表针正向摆动。
此时,电池的正极与黑表笔连接的为同相端。同理,把表笔换到另一相再判断一次,便可找出绕组的首尾端。
4、电动机转向法
如中图所示。把电动机三相绕组连接成Y形,并将星点接地,如供电变压器中心接地或接零。另外,三根绕组出线作出A、B、C标记。两根电源的标记为1、2,并分别按顺序接到电动机的两根引出线上,作三次旋转方向实验。若电动机的旋转方向都一致。说明三相绕组首尾端连接正确,若转向不一致,则说明参与两次同方向运转中,两次接入电源的一相绕组首尾反接。
如第二次B、C相和第三次A、C相接入电源同向旋转,C相两次接入电源表示该相首尾反接。
采用此法只适用于较小容量电动机空朝载状态下短时运转,无需仪表和低压电源,比较方便。
当电动机的六根引出线的首尾端一确定之后,根据电动机的铭牌上规定的接法,六根引出线可以进行正确的连接。连接方法有星形(Y)连接和三角形(Δ)连接两种,如下图所示。

U1、U2是第一相绕组的首尾端(旧标号是D1、D4);
V1、V2是第二相绕组和首尾端(旧标号是D2、D5);
W1、W2是第三相绕组的首尾端(旧标号是D3、D6)。




")
")