・上一文章:检修发电机后发电机就不能发电了
・下一文章:教你如何选择换装的蓄电池
3)混合动力驱动系统基本组成
混合动力驱动系统主要由HV蓄电池、混合动力变速驱动桥、行星齿轮组、变频器和HV控制ECU等组成。
①HV蓄电池
由168个单格镍氢蓄电池[(1.2V×6蓄电池)×28个模块]组成,额定电压DC201.6V,安装在车辆后备箱内。在车辆起步,加速和上坡时,HV电池将电能提供给驱动电机或储存发电机和再生制动产生的电能。
②混合动力变速驱动桥
混 合 动 力 变 速 驱 动 桥 由 发 电 机MG1,驱动电机MG2和行星齿轮组成。发电机MG1类型为三相永磁无刷同步发电机。MG1由发动机带动旋转,产生高压电向驱动电机MG2供给电能或向HV电池充电。同时它还可以作为电动机启动发动机或调节发动机最佳运行转速。最大扭矩时,最高电压为AC500V,电流为75A。驱动电机MG2为三相永磁无刷同步电动机,它是由来自MG1或HV蓄电池的电能驱动,产生车辆行驶动力,减速或制动时,产生再生制动电能向HV蓄电池充电。最高电压为AC500V,最大输出功率为50kW(1200~1540r/min),最大扭矩为400N·m(0~1200r/min)。
③行星齿轮组
行星齿轮组以适当比例,分配发动机或电动机驱动力,直接驱动车辆和发电机,实现车辆无级变速行驶。
④变频器
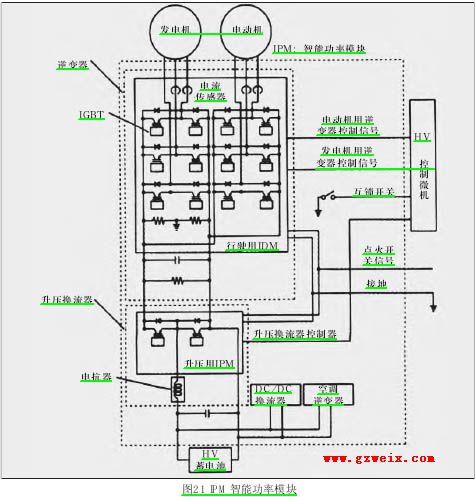

变频器采用了IPM智能功率模块(如图21所示),由增压转换器,逆变/整流器,直流转换器,空调变频器组成(如图22所示)。增压转换器的作用是将HV电池201.6V直流电压增压到500V直流电压(反之从500V降压到201.6V)。逆变/整流器的作用是将DC 500V转换成AC 500V,给电动机MG2供电(反之将AC 500V转换成DC500V,经降压后,给HV电池充电)。直流转换器作用是将HV电池DC 201.6V降为DC 12V,为车身电器供电。空调变频器的作用是将HV电池DC201.6V转换成AC 201.6V交流电为空调系统中电动变频压缩机供电。
⑤HV控制ECU
HV控制ECU采用32位计算机,接收来自传感器和控制器(发动机ECU、HV电池ECU、制动防滑控制ECU、电动转向ECU、MG1、MG2解角传感器、MG1,MG2电压和电流传感器等)信息,根据此信息,计算车辆所需的扭矩和功率,将计算结果发送给发动机ECU、变频器总成、HV电池ECU和制动防滑控制ECU。
(4)混合动力驱动电机
①混合动力系统对驱动电机性能的要求高电压。在允许的范围内,尽量采用高电压,可以减小电动机的尺寸和导线等装备的尺寸,减小电机的铜损,特别是可以降低逆变器的成本。
高转速。电动机的转速可以达到6000~10000r/min以上,高转速电机的体积小,功率密度高,质量轻,有利于降低整车的装备质量。启动扭矩大。电动机应具有较大的启动转矩和较宽的调速范围,以获得车辆在启动、加速、行驶、减速、制动等工况时所需的转矩和功率。
转矩响应速度快。具有较强的瞬过载能力,能够适应路面变化及频繁启动和制动等复杂运行工况。
调速范围宽。电动机应具有制动调速功能以减轻驾驶员操纵强度,并且能够达到与发动机加速踏板同步的控制响应,转速范围能覆盖恒转矩输出区和恒功率输出区。
应有最优化的能量利用。在车辆减速时,实现再生制动能量回收。
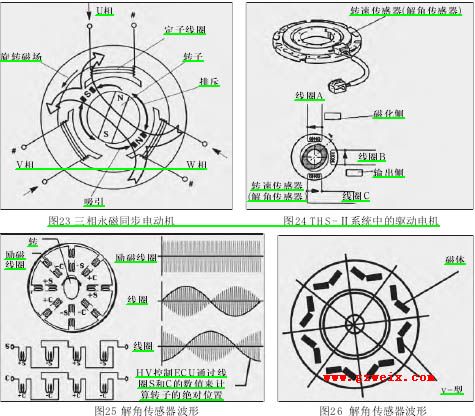
永磁无刷电动机能满足混合动力系统对驱动电机的要求,因此在国内外多种混合动力汽车和纯电动汽车上获得运用。永磁无刷电动机可以分为两大类:一类是逆变器输出方驱动的无刷直流电机(BLDC),另一类是逆变器输给电动机三相正弦电流的永磁同步电动机(PMSM)。三相永磁同步电动机是由电励磁式同步电动机发展而来。它用永磁体代替了电励磁系统,从而省去了励磁绕组,集电环和电刷。而定子与电励磁式同步电动机基本相同。永磁转子在定子绕组旋转磁场作用下产生转矩(如图23所示)。为减少转矩脉动,要求其电机的感应电压一定是正弦波,这也是PMSM的一个基本特征。
②永磁同步电动机转子结构
永磁同步电动机按永磁体安装形式分类,有面装式、插入式和内装式三种。每种类型转子结构、永磁体的形状和转子的具体布置形式,根据永磁材料的类别和设计要求不同,可以有多种选择。但有一基本原则,即除了考虑成本制造和可靠运行外,应尽量产生正弦分布的磁场。
THS-Ⅱ系统中的驱动电机采用一种新型的具有高剩磁和高矫顽力的钕铁硼永磁铁按“V”形状布置,嵌装在转子铁芯内部(内装径向式转子),如图24所示。其优点漏磁系数小,转子轴上不需要采取隔磁措施,转子的机械强度高。并且永磁铁能够提供更大的励磁面积,增加电磁转矩和磁阻转矩。
③驱动电动机定子绕组
驱动电动机定子绕组采用分布式串联绕组,在给定电流时,加倍的绕组匝数串联将转矩加倍增加,在电机低速区,感应电压较低,201.6V的HV电池电压足够驱动电机运行。并且由于HV电池电压增压后,输入电机电枢的电压较高,绕组导线的线径减小,使电机的核心长度由上一代驱动电机的88.9mm,缩短为81.2mm。
④驱动电机解角传感器
为了达到电机能从静止启动,以及全转速范围内转矩控制目的,需要利用解角传感器精确地测量MG1、MG2永磁转子磁极位置和速度。解角传感器是采用电磁感应原理制成的旋转型感应传感器,传感器由定子和椭圆转子组成,如图25所示。椭圆型转子与电机的永磁转子相连接,同步转动。椭圆型转子外圆曲线代表着永磁转子磁极位置。定子包括一个励磁线圈和两个检测线圈,两个检测线圈S和C轴线在空间坐标上正交,HV控制 ECU按预定频率的交流电流输入励磁线圈A,随着椭圆型转子的旋转,转子和定子间的气隙发生变化,就会在检测线圈S和C上感应出相位差900正弦,余弦感应电压,HV控制 ECU根据检测线圈S和C感应电压的波形相位和幅值,以及波形的脉冲次数(如图26所示),计算出电机转子的磁极位置和转速值信号,作为HV控制 ECU对电机矢量控制的基础信号。(未完待续)
")
")
")
")

