·上一文章:详解奥迪A3驻车转向辅助系统(下)
·下一文章:解析丰田车系导航故障诊断方式
综合机能剖析及主动控制原理
车轮速度传感器:
在汽车上检测轮速信号时,最常用的传感器是电磁感应式传感器,一般做法是将传感器安装在车轮总成的非旋转部分﹙如转向节或轴头﹚上,与随车轮一起转动的导磁材料制成的齿圈相对。当齿圈相对传感器转动时,由于磁阻的变化,在传感器上激励出交变电压信号,这种交变电压的频率与车轮转速成正比,ECU采用专门的信号处理电路将传感器信号转换为同频率的方波,再通过测量方波的频率或周期来计算车轮转速。
现代汽车中越来越多地采用了主动式或磁阻式车轮速度传感器。
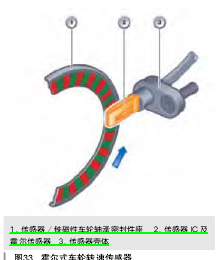
该传感器以霍尔原理工作,其特点在于它能识别向前和后退运动。在这样的车轮转速传感器(如图33所示)中,磁铁将取代信号齿轮中齿的作用。磁铁分为南极和北极,交替布置在一个极性环上。与被动式车轮速度传感器不同的是,主动式车轮速度传感器以规定的电压供电,并将车轮速度传感器中所生成的矩形波信号提供给控制单元。在矩形脉冲的宽度下和一个脉冲间的距离中,已包含了制动控制单元所需的众多信息。
安装在保时捷Boxster上的车速传感器被命名为主动转速传感器。主动转速传感器需要外部电源。通过一条双电缆电线与控制单元相连接。由PSM控制单元向主动转速传感器提供电源和接地连接。集成在主动转速传感器中的传感器元件的功能主要基于霍尔原理,因而取决于磁场的强度和方向。与霍尔屏障不同,磁性启动的转子会经过扫描。转子通过围线零磁力点交替换极性来触发传感器。而电流变化则转化为车速信号,并由传感器元件中的电路发送到PSM控制单元。
车辆维护中值得注意的是:对传感器进行电阻测量可能导致主动转速传感器受到损坏。
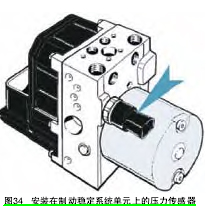
制动压力传感器:
制动压力传感器(位置如图34所示)向动态行驶稳定控制单元提供制动管路内的实际压力信号(减速请求)。控制单元根据这个压力信号计算出车轮制动力及作用在车上的纵向力。如果需要动态行驶稳定系统工作,控制单元将用现有车轮制动力来计算横向牵引力。
电动液压助力转向系统
电动助力转向﹙Electrical Power Assisted Steering,简称EPS﹚是一种由电机提供直接辅助转矩的动力转向系统。电动助力转向的基本原理是转矩传感器与转向轴﹙或小齿轮轴﹚连接在一起,当转向轴转动时,转矩传感器把输入轴和输出轴在扭杆作用下产生的相对转动角位移变成电信号传给电子控制单元﹙ECU﹚, ECU根据车速传感器和转矩传感器的信号控制电机的旋转方向和助力大小,实时控制助力转向。因此它可以很容易地实现在车速不同时提供电机不同的助力效果,保证汽车在低速转向行驶时轻便灵活,高速转向行驶时稳定可靠。
")
")
")
")

