・上一文章:检修汽车空调系统常见故障
・下一文章:分析及检修柴油机燃油系统故障
汽车仪表是汽车与驾驶员进行信息交流的窗口,是汽车信息的中心,能够集中、直观、迅速地反映汽车在行驶过程中的各种动态指标,如行驶速度、里程、制动压力、发动机转速、冷却液温度、油量、各种危险报警。随着科技进步,汽车排放、节能、安全和舒适性等使用性能不断提高,汽车电子控制程度也越来越高。汽车电子控制装置必须迅速准确地处理各种信息,并通过仪表显示出来,使驾驶员能够及时了解并掌握汽车的运行状态,以妥善处理各种情况。
汽车控制器局域网,是目前应用最广泛的总线之一,由德国 BOSCH公司开发的一种有效支持分布式实时控制的串行通信网络,主要用于嵌入式控制器的通信系统及智能装置的开放通信系统。它传输的信息适时性强,可靠性高,还能抵抗现场环境干扰。控制局域网是用来作为汽车环境中微控制器之间的通信,在车载各个电子控制装置与 ECU 之间交换信息,形成汽车电子控制网络。
本文所述的控制局域网总线式的汽车仪表不但具有传统仪表的数据采集功能,而且利用控制局域网总线技术,与汽车上其他的控制单元进行通信,使仪表成为控制局域网的一部分。
一、控制局域网介绍
控制局域网工作的核心内容就是怎样通过 2 根或若干根通信线,传输远远超过 2 个的信息量。
当总线上的一个节点(站)发送数据时,它以报文形式光波发给网络中所有节点。对每一个节点来说,无论数据是否是发给自己的,都对其接收。每组报文开头的 11 位字符为标识符,它定义了报文的优先级,这种报文格式称为面向内容的编址方案。在同一系统中标识符是惟一的,不可能有 2 个站发送具有相同标识符的报文。当几个站同时竞争总线读取时,这种配置很重要。当一个站要向其他站发送数据时,该站的 CPU 将要发送的数据和自己的标识符传送给本站的 CAN 芯片,并处于准备状态,当它收到总线空闲信号时,转为发送报文状态。CAN 芯片将数据根据协议组织成一定的报文格式发出,这时网上的其他站处于接收状态。每一个处于接收状态的站对接收到的报文进行检测,判断这些报文是否是发给自己的。
由于控制局域网总线是一种面向内容的编码方案,因此很容易建立高水准的控制系统并灵活地进行配置。当所提供的新站点是纯数据接收设备时,数据传输协议不要求独立的部分有物理目的地址。它允许分布过程同步化,即总线上控制器需要测量数据时,由网上获得,而无须每个控制器都有自己独立的传感器。
二、研究思路汽车仪表
主 要 组成:车速表、转速表、水温表、油量表、里程表、报 警 指 示灯、多功能信息显示系统以及系统照明等。在现代汽车仪表板上,车速表、转速表、水温表、油量表多数使用常规的指针式仪表,将采集到的车速、发动机转速、水温信息以及燃油信息通过处理,经过步进电机驱动仪表指针指示出来。
在数据传输方面,如果信息需要共享,而且传输距离比较长的信号,基本上都采用控制局域网总线传输,比如车速、制动防抱死信号、车身稳定控制系统、发动机转速、发动机冷却液温度、巡航信号、环境温度信号、前雾灯信号、后雾灯信号、挡位信号、制动警告信号、诊断信号等。如果信号不需要共享、而且传输距离不长,用硬线很容易连接的,采用硬线直连,比如转向信号、蓄电池充电警告信号、安全带开关信号、燃油信号及制动液位过低信号等。
在信息显示方面,多功能信息显示屏主要显示的内容为总里程数、双短里程数、车外温度、车内温度、平均油耗、已行驶距离、已行驶时间、平均车速、车辆运行状态以及故障诊断等其他信息。指示报警灯采用背光 LED显示,显示的内容主要为 ABS 报警灯、制动报警灯、发动机故障报警灯等相关报警信息。
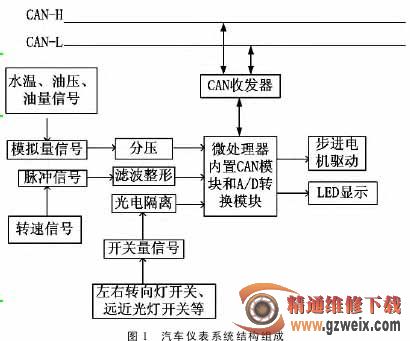
汽车仪表系统由数据采集、处理以及显示 3 个模块组成。其中数据采集模块负责接收车辆的各种数据,并将数据预处理后发送至微处理器。其中模拟量信号、脉冲信号以及开关量信号等传感器信号在各传感器处采集后,分别经过分压、滤波整形以及光电隔离后发送至微处理器。而发动机转速、水温和故障代码等 CAN 总线数据通过发动机 CAN 模块发送至 CAN 总线后,通过 CAN 收发器进行接收。微处理器接收到需要的数据后,根据预定的算法对数据进行处理,并将处理结果输出。显示模块包括指针、LCD以及各种信号灯的显示。微处理器将发动机转速、车速等结果输出至电机驱动器,驱动器驱动步进电机转动,从而带动指针显示;微处理器直接驱动LCD 显示及 LED 灯的亮灭。汽车仪表系统结构如图 1 所示。
三、系统硬件设计
汽 车 仪 表 的 微 处 理 器 采 用PIC18F2682,内嵌 CAN 控制器,CAN控制器同其他外围芯片一起构成了CAN 总线的接口电路。CAN 总线是一种有效支持分布式控制和实时控制的串行通信网络,为提高系统的驱动能力,增大通信距离 , 实 际 应 用 中 多 采 用MCP2551 芯片作为 CAN 控制器与物理总线间的接口,即CAN 收发器,以增强对总线的差动发送能力和对 CAN 控制器的差动接收能力。为进一步增强抗干扰能力,在 CAN 控制器与收发器之间设置光电隔离电路。
步进电机驱动采用VID6606 驱动器。每片 VID6606可同时驱动 4 路步进电机。在其频率控制端输入脉冲序列 F(scx),即可控制输出端使步进电机的输出轴以微步转动,每个微步电机输出轴转动 1/12(°),最大角速度可达 600(°/s。该电机驱动器具有以下特点:硬件微步驱动、简单易用,电机只需速度 F(scx)和方向(CW/CCW)2 个控制端、所有输入引脚都有干扰过滤器、宽工作电压、低电磁干扰辐射。仪表板指针采用 VID-29 电机驱动,电机内置减速比 180/1 的齿轮系,能够将数字信号直接准确地转为模拟的显示输出。该电机具有很高的显示精度,其步距角最小可达到 1/12(°)。
该仪表利用 LCD 显示时间、燃油消耗量以及产生故障时的故障名称,处理器发送的信号先经功率放大后,再送至液晶屏显示。
")
")
")
")

